
Apollo PGNCS
Encyclopedia
The Apollo Primary Guidance, Navigation and Control System (PGNCS) was a self-contained inertial guidance system that allowed Apollo spacecraft
to carry out their missions when communications with Earth were interrupted, either as expected, when the spacecraft were behind the moon, or in case of a communications failure. The Apollo Command Module
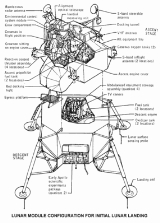
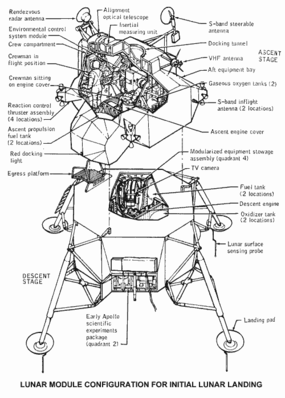
(CM) and Lunar Module (LM), were each equipped with a version of PGNCS. PGNCS, and specifically its computer, were also the command center for all system inputs from the LM, including the Kollsman Instrument built Alignment Optical Telescope, the radar system, the manual Translation and Rotation device inputs by the astronauts as well as other inputs from the LM systems.
PGNCS was developed by the MIT Instrumentation Laboratory. The Prime Contractor for PGNCS and manufacturer of the Inertial Measurement Unit, IMU was the Delco Division of General Motors. Development was under the direction of Charles Stark Draper
and MIT Draper Labs and consisted of the following components:
 The CM and LM used the same computer, inertial platform and resolvers. The main difference was the optical unit. The Navbase was different for each spacecraft as well, reflecting the differing mounting geometries. The LM's rendezvous radar
The CM and LM used the same computer, inertial platform and resolvers. The main difference was the optical unit. The Navbase was different for each spacecraft as well, reflecting the differing mounting geometries. The LM's rendezvous radar
was also connected to its Navbase.
There were two versions of PGNCS—Block I and Block II—corresponding to the two generations of the CM. After the Apollo I fire, which occurred in a Block I CM, NASA
decided that no further manned missions would use Block I, though unmanned missions did. Major differences between Block I and Block II PGNCS included replacing electromechanical resolvers with an all electronic design and replacing the Block I Navbase, which was machined from beryllium
, with a frame built out of aluminum tubing filled with polyurethane
foam. The Block II Navbases were lighter, cheaper and just as rigid.
Components from PGNCS were used by Draper for the U.S. Navy's Deep Submergence Rescue Vehicle
(DSRV)
s and three accelerometer
s mounted in it. Feedback loops including the resolvers used signals from the gyroscopes to control motors at each axis. This servo
system kept the stable member fixed with respect to inertial space
. The IMU was derived from the guidance system developed by Draper for the Polaris missile.
Inertial guidance systems are not perfect and Apollo system drifted about one milliradian
per hour. Thus it was necessary to "realign" the inertial platform periodically by sighting on stars.
the AOT, which could measure angles between stars, and Earth or Moon landmarks and planetary horizon. The unit included a scanning telescope for star sightings, and could be used to determine position and orientation in space. In contrast, the LM had an Alignment Optical Telescope, and could only determine the craft's orientation. The outer element of the AOT was a sun-shielded prism that could be rotated to one of three fixed positions relative to the LM, in order to cover a large portion of the lunar sky. When rotated, the AOT's position was readable by the AGC; by pointing the reticule at several different stars, the computer could determine the craft's orientation http://www.hq.nasa.gov/office/pao/History/alsj/aot.htm.
to merge new data with past position measurements to produce an optimal position estimate for the spacecraft. The key information was a coordinate transformation between the IMU stable member and the two reference coordinate systems, one centered on Earth and one centered on the Moon. In the argot of the Apollo program this matrix was known as REFSMMAT
(for "Reference to a Stable Member Matrix").
was processed by computers at Mission Control, using least squares
algorithms. The position and velocity estimates that resulted were more accurate than those produced by PGNCS. As a result, the astronauts were periodically given REFSMMAT updates to enter into the AGC, based on ground data. PGNCS was still essential to maintain spacecraft orientation, to control rockets during maneuvering burns, including lunar landing and take off, and as the prime source of navigation data during planned and unexpected communications outages. PGNCS also provided a check on ground data.
The lunar module had a third means of navigation, the Abort Guidance System (AGS), built by TRW
. This was to be used in the event of failure of PGNCS. The AGS could be used to take off from the moon, and to rendezvous with the Command Module, but not for landing.
Apollo spacecraft
The Apollo spacecraft was composed of five combined parts designed to accomplish the American Apollo program's goal of landing astronauts on the Moon by the end of the 1960s and returning them safely to Earth...
to carry out their missions when communications with Earth were interrupted, either as expected, when the spacecraft were behind the moon, or in case of a communications failure. The Apollo Command Module
Apollo Command/Service Module
The Command/Service Module was one of two spacecraft, along with the Lunar Module, used for the United States Apollo program which landed astronauts on the Moon. It was built for NASA by North American Aviation...
(CM) and Lunar Module (LM), were each equipped with a version of PGNCS. PGNCS, and specifically its computer, were also the command center for all system inputs from the LM, including the Kollsman Instrument built Alignment Optical Telescope, the radar system, the manual Translation and Rotation device inputs by the astronauts as well as other inputs from the LM systems.
PGNCS was developed by the MIT Instrumentation Laboratory. The Prime Contractor for PGNCS and manufacturer of the Inertial Measurement Unit, IMU was the Delco Division of General Motors. Development was under the direction of Charles Stark Draper
Charles Stark Draper
Charles Stark Draper was an American scientist and engineer, often referred to as "the father of inertial navigation." He was the founder and director of the MIT Instrumentation Laboratory, later renamed the Charles Stark Draper Laboratory, which under his direction designed and built the Apollo...
and MIT Draper Labs and consisted of the following components:
- an Inertial Measurement UnitInertial measurement unitAn inertial measurement unit, or IMU, is an electronic device that measures and reports on a craft's velocity, orientation, and gravitational forces, using a combination of accelerometers and gyroscopes. IMUs are typically used to maneuver aircraft, including UAVs, among many others, and...
(IMU) - the Apollo Guidance ComputerApollo Guidance ComputerThe Apollo Guidance Computer provided onboard computation and control for guidance, navigation, and control of the Command Module and Lunar Module spacecraft of the Apollo program...
- resolvers to convert inertial platform angles to signals usable for servo control
- an optical unit
- a mechanical frame, called the Navigation Base (or Navbase), to rigidly connect the optical device and, in the LM, the rendezvous radar to the IMU
- the AGC software
Versions
Radar
Radar is an object-detection system which uses radio waves to determine the range, altitude, direction, or speed of objects. It can be used to detect aircraft, ships, spacecraft, guided missiles, motor vehicles, weather formations, and terrain. The radar dish or antenna transmits pulses of radio...
was also connected to its Navbase.
There were two versions of PGNCS—Block I and Block II—corresponding to the two generations of the CM. After the Apollo I fire, which occurred in a Block I CM, NASA
NASA
The National Aeronautics and Space Administration is the agency of the United States government that is responsible for the nation's civilian space program and for aeronautics and aerospace research...
decided that no further manned missions would use Block I, though unmanned missions did. Major differences between Block I and Block II PGNCS included replacing electromechanical resolvers with an all electronic design and replacing the Block I Navbase, which was machined from beryllium
Beryllium
Beryllium is the chemical element with the symbol Be and atomic number 4. It is a divalent element which occurs naturally only in combination with other elements in minerals. Notable gemstones which contain beryllium include beryl and chrysoberyl...
, with a frame built out of aluminum tubing filled with polyurethane
Polyurethane
A polyurethane is any polymer composed of a chain of organic units joined by carbamate links. Polyurethane polymers are formed through step-growth polymerization, by reacting a monomer with another monomer in the presence of a catalyst.Polyurethanes are...
foam. The Block II Navbases were lighter, cheaper and just as rigid.
Components from PGNCS were used by Draper for the U.S. Navy's Deep Submergence Rescue Vehicle
Deep Submergence Rescue Vehicle
A Deep Submergence Rescue Vehicle is a type of Deep Submergence Vehicle used for rescue of downed submarines and clandestine missions. While DSRV is the term most often used by the United States Navy other nations have different designations for their vehicles.- Chinese models :The People's...
(DSRV)
Inertial Measurement Unit
The IMU was gimbaled on three axes. The innermost stable member, a 6 inch beryllium cube, had three gyroscopeGyroscope
A gyroscope is a device for measuring or maintaining orientation, based on the principles of angular momentum. In essence, a mechanical gyroscope is a spinning wheel or disk whose axle is free to take any orientation...
s and three accelerometer
Accelerometer
An accelerometer is a device that measures proper acceleration, also called the four-acceleration. This is not necessarily the same as the coordinate acceleration , but is rather the type of acceleration associated with the phenomenon of weight experienced by a test mass that resides in the frame...
s mounted in it. Feedback loops including the resolvers used signals from the gyroscopes to control motors at each axis. This servo
Servomechanism
thumb|right|200px|Industrial servomotorThe grey/green cylinder is the [[Brush |brush-type]] [[DC motor]]. The black section at the bottom contains the [[Epicyclic gearing|planetary]] [[Reduction drive|reduction gear]], and the black object on top of the motor is the optical [[rotary encoder]] for...
system kept the stable member fixed with respect to inertial space
Inertial space
In physics, the expression inertial space refers to the background reference that is provided by the phenomenon of inertia.Inertia is opposition to change of velocity, that is: change of velocity with respect to the background, the background that all physical objects are embedded in....
. The IMU was derived from the guidance system developed by Draper for the Polaris missile.
Inertial guidance systems are not perfect and Apollo system drifted about one milliradian
Radian
Radian is the ratio between the length of an arc and its radius. The radian is the standard unit of angular measure, used in many areas of mathematics. The unit was formerly a SI supplementary unit, but this category was abolished in 1995 and the radian is now considered a SI derived unit...
per hour. Thus it was necessary to "realign" the inertial platform periodically by sighting on stars.
Optical unit
The CM had a fixed sextantSextant
A sextant is an instrument used to measure the angle between any two visible objects. Its primary use is to determine the angle between a celestial object and the horizon which is known as the altitude. Making this measurement is known as sighting the object, shooting the object, or taking a sight...
the AOT, which could measure angles between stars, and Earth or Moon landmarks and planetary horizon. The unit included a scanning telescope for star sightings, and could be used to determine position and orientation in space. In contrast, the LM had an Alignment Optical Telescope, and could only determine the craft's orientation. The outer element of the AOT was a sun-shielded prism that could be rotated to one of three fixed positions relative to the LM, in order to cover a large portion of the lunar sky. When rotated, the AOT's position was readable by the AGC; by pointing the reticule at several different stars, the computer could determine the craft's orientation http://www.hq.nasa.gov/office/pao/History/alsj/aot.htm.
Software
The onboard guidance software used a Kalman filterKalman filter
In statistics, the Kalman filter is a mathematical method named after Rudolf E. Kálmán. Its purpose is to use measurements observed over time, containing noise and other inaccuracies, and produce values that tend to be closer to the true values of the measurements and their associated calculated...
to merge new data with past position measurements to produce an optimal position estimate for the spacecraft. The key information was a coordinate transformation between the IMU stable member and the two reference coordinate systems, one centered on Earth and one centered on the Moon. In the argot of the Apollo program this matrix was known as REFSMMAT
Refsmmat
REFSMMAT is a term used by guidance, navigation, and control system flight controllers during the Apollo program, which carried over into the Shuttle Program. REFSMMAT stands for "Reference to Stable Member Matrix". It is a numerical definition of a fixed orientation in space and is usually ...
(for "Reference to a Stable Member Matrix").
Who's in charge?
Despite the word "primary" in its name, PGNCS data was not the main source of navigation information. Tracking data from NASA’s Deep Space NetworkDeep Space Network
The Deep Space Network, or DSN, is a world-wide network of large antennas and communication facilities that supports interplanetary spacecraft missions. It also performs radio and radar astronomy observations for the exploration of the solar system and the universe, and supports selected...
was processed by computers at Mission Control, using least squares
Least squares
The method of least squares is a standard approach to the approximate solution of overdetermined systems, i.e., sets of equations in which there are more equations than unknowns. "Least squares" means that the overall solution minimizes the sum of the squares of the errors made in solving every...
algorithms. The position and velocity estimates that resulted were more accurate than those produced by PGNCS. As a result, the astronauts were periodically given REFSMMAT updates to enter into the AGC, based on ground data. PGNCS was still essential to maintain spacecraft orientation, to control rockets during maneuvering burns, including lunar landing and take off, and as the prime source of navigation data during planned and unexpected communications outages. PGNCS also provided a check on ground data.
The lunar module had a third means of navigation, the Abort Guidance System (AGS), built by TRW
TRW
TRW Inc. was an American corporation involved in a variety of businesses, mainly aerospace, automotive, and credit reporting. It was a pioneer in multiple fields including electronic components, integrated circuits, computers, software and systems engineering. TRW built many spacecraft,...
. This was to be used in the event of failure of PGNCS. The AGS could be used to take off from the moon, and to rendezvous with the Command Module, but not for landing.