

Dynamic positioning
Encyclopedia

Semi-submersible
A semi-submersible is a specialised marine vessel with good stability and seakeeping characteristics. The semi-submersible vessel design is commonly used in a number of specific offshore roles such as for offshore drilling rigs, safety vessels, oil production platforms and heavy lift cranes.The...
Mobile Offshore Drilling
Offshore drilling
Offshore drilling refers to a mechanical process where a wellbore is drilled through the seabed. It is typically carried out in order to explore for and subsequently produce hydrocarbons which lie in rock formations beneath the seabed...
Units (MODU) and Oceanographic Research Vessels.
The computer program contains a mathematical model of the vessel that includes information pertaining to the wind and current drag of the vessel and the location of the thrusters. This knowledge, combined with the sensor information, allows the computer to calculate the required steering angle and thruster output for each thruster. This allows operations at sea where mooring or anchoring is not feasible due to deep water, congestion on the sea bottom (pipelines, templates) or other problems.
Dynamic positioning may either be absolute in that the position is locked to a fixed point over the bottom, or relative to a moving object like another ship or an underwater vehicle. One may also position the ship at a favourable angle towards wind, waves and current, called weathervaning.
Dynamic positioning is utilized by much of the offshore oil industry, for example in the North Sea
North Sea
In the southwest, beyond the Straits of Dover, the North Sea becomes the English Channel connecting to the Atlantic Ocean. In the east, it connects to the Baltic Sea via the Skagerrak and Kattegat, narrow straits that separate Denmark from Norway and Sweden respectively...
, Persian Gulf
Persian Gulf
The Persian Gulf, in Southwest Asia, is an extension of the Indian Ocean located between Iran and the Arabian Peninsula.The Persian Gulf was the focus of the 1980–1988 Iran-Iraq War, in which each side attacked the other's oil tankers...
, Gulf of Mexico
Gulf of Mexico
The Gulf of Mexico is a partially landlocked ocean basin largely surrounded by the North American continent and the island of Cuba. It is bounded on the northeast, north and northwest by the Gulf Coast of the United States, on the southwest and south by Mexico, and on the southeast by Cuba. In...
, West Africa
West Africa
West Africa or Western Africa is the westernmost region of the African continent. Geopolitically, the UN definition of Western Africa includes the following 16 countries and an area of approximately 5 million square km:-Flags of West Africa:...
, and off the coast of Brazil
Brazil
Brazil , officially the Federative Republic of Brazil , is the largest country in South America. It is the world's fifth largest country, both by geographical area and by population with over 192 million people...
. There are currently more than 1800 DP ships.
History
Dynamic positioning started in the 1960s for offshore drillingOffshore drilling
Offshore drilling refers to a mechanical process where a wellbore is drilled through the seabed. It is typically carried out in order to explore for and subsequently produce hydrocarbons which lie in rock formations beneath the seabed...
. With drilling moving into ever deeper waters, Jack-up barges could not be used any more and anchoring became less economical.
In 1961 the drillship Cuss 1 was fitted with four steerable propellers, in an attempt to drill the first Moho
Mohorovičić discontinuity
The Mohorovičić discontinuity , usually referred to as the Moho, is the boundary between the Earth's crust and the mantle. Named after the pioneering Croatian seismologist Andrija Mohorovičić, the Moho separates both the oceanic crust and continental crust from underlying mantle...
well. It was possible to keep the ship in position above the well off La Jolla, California, at a depth of 948 meters.
After this, off the coast of Guadalupe
Guadalupe Island
Guadalupe Island, or Isla Guadalupe is a volcanic island located 241 kilometers off the west coast of Mexico's Baja California peninsula and some 400 kilometers southwest of the city of Ensenada in Baja California state, in the Pacific Ocean...
, Mexico, five holes were drilled, the deepest at 183 m (601 ft) below the sea floor in 3,500 m (11,700 ft) of water, while maintaining a position within a radius of 180 meters. The ship's position was determined by radar
Radar
Radar is an object-detection system which uses radio waves to determine the range, altitude, direction, or speed of objects. It can be used to detect aircraft, ships, spacecraft, guided missiles, motor vehicles, weather formations, and terrain. The radar dish or antenna transmits pulses of radio...
ranging to buoy
Buoy
A buoy is a floating device that can have many different purposes. It can be anchored or allowed to drift. The word, of Old French or Middle Dutch origin, is now most commonly in UK English, although some orthoepists have traditionally prescribed the pronunciation...
s and sonar
Sonar
Sonar is a technique that uses sound propagation to navigate, communicate with or detect other vessels...
ranging
Ranging
Ranging is a process or method to determine the distance from one location or position to another location or position. Another term for this method is lateration, see unilateration...
from subsea beacons.
Whereas the Cuss 1 was kept in position manually, later in the same year Shell
Shell Oil Company
Shell Oil Company is the United States-based subsidiary of Royal Dutch Shell, a multinational oil company of Anglo Dutch origins, which is amongst the largest oil companies in the world. Approximately 22,000 Shell employees are based in the U.S. The head office in the U.S. is in Houston, Texas...
launched the drilling ship Eureka that had an analogue control system interfaced with a taut wire, making it the first true DP ship.
While the first DP ships had analogue controllers and lacked redundancy, since then vast improvements have been made. Besides that, DP nowadays is not only used in the oil industry, but also on various other types of ships. In addition, DP is not limited to maintaining a fixed position any more. One of the possibilities is sailing an exact track, useful for cablelay
Cable layer
A cable layer or cable ship is a deep-sea vessel designed and used to lay underwater cables for telecommunications, electricity, and such. Cable ships are distinguished by large cable sheaveshttp://atlantic-cable.com/Cableships/Monarch%284%29/ | History of the Atlantic Cable & Undersea...
, pipelay, survey and other tasks.
Comparison between position-keeping options
Other methods of position-keeping are the use of an anchorAnchor
An anchor is a device, normally made of metal, that is used to connect a vessel to the bed of a body of water to prevent the vessel from drifting due to wind or current. The word derives from Latin ancora, which itself comes from the Greek ἄγκυρα .Anchors can either be temporary or permanent...
spread and the use of a jack-up barge. All have their own advantages and disadvantages.
| Comparison position-keeping options | ||
|---|---|---|
| Jack-up Barge | Anchoring | Dynamic Positioning |
Advantages:
|
Advantages:
|
Advantages:
|
| Disadvantages:
|
Disadvantages:
|
Disadvantages:
|
Although all methods have their own advantages, dynamic positioning has made many operations possible that were not feasible before.
The costs are falling due to newer and cheaper technologies and the advantages are becoming more compelling as offshore work enters ever deeper water and the environment (coral) is given more respect. With container operations, crowded ports can be made more efficient by quicker and more accurate berthing techniques. Cruise ship operations benefit from faster berthing and non-anchored "moorings" off beaches or inaccessible ports.
Applications

- Servicing Aids to Navigation (ATONAtonThe term Aton may refer to:* Aten or Aton, the disk of the sun, regarded as a deity in ancient Egyptian mythology* Aton Capital, a Russian investment bank* ATON, abbreviation for Aid to Navigation* Archive of Turkish Oral NarrativePeople...
) - Cable-layingCable layerA cable layer or cable ship is a deep-sea vessel designed and used to lay underwater cables for telecommunications, electricity, and such. Cable ships are distinguished by large cable sheaveshttp://atlantic-cable.com/Cableships/Monarch%284%29/ | History of the Atlantic Cable & Undersea...
- Crane vesselCrane vesselA crane vessel, crane ship or floating crane is a ship with a crane specialized in lifting heavy loads. The largest crane vessels are used for offshore construction. Conventional monohulls are used, but the largest crane vessels are often catamaran or semi-submersible types as they have increased...
s - Cruise shipCruise shipA cruise ship or cruise liner is a passenger ship used for pleasure voyages, where the voyage itself and the ship's amenities are part of the experience, as well as the different destinations along the way...
s - Diving support vesselDiving support vesselA diving support vessel is a ship that is used as a floating base for professional diving projects.Commercial Diving Support Vessels emerged during the 1960s and 1970s when the need arose for diving operations to be performed below and around oil production platforms and associated installations in...
s - Dredging
- DrillshipDrillshipA drillship is a maritime vessel that has been fitted with drilling apparatus. It is most often used for exploratory offshore drilling of new oil or gas wells in deep water or for scientific drilling. The drillship can also be used as a platform to carry out well maintenance or completion work such...
s - FPSOsFloating Production Storage and OffloadingA floating production, storage and offloading unit is a floating vessel used by the offshore industry for the processing of hydrocarbons and for storage of oil. A FPSO vessel is designed to receive hydrocarbons produced from nearby platforms or subsea template, process them, and store oil until it...
- FlotelFlotelFlotel, a portmanteau of the terms floating hotel, refers to the installation of living quarters on top of rafts or semi-submersible platforms...
s - Landing Platform Docks
- Maritime research
- Mine sweepersMinesweeper (ship)A minesweeper is a small naval warship designed to counter the threat posed by naval mines. Minesweepers generally detect then neutralize mines in advance of other naval operations.-History:...
- Pipe-laying shipPipe-laying shipA pipelaying ship is a maritime vessel used in the construction of subsea infrastructure. It serves to connect oil production platforms with refineries on shore...
- Platform supply vesselPlatform supply vesselA Platform supply vessel is a ship specially designed to supply offshore oil platforms. These ships range from 20 to 100 meters in length and accomplish a variety of tasks...
s - Rockdumping
- Sea LaunchSea LaunchSea Launch is a spacecraft launch service that uses a mobile sea platform for equatorial launches of commercial payloads on specialized Zenit 3SL rockets...
- Sea-based X-band RadarSea-based X-band RadarSea-Based X-Band Radar is a floating, self-propelled, mobile radar station designed to operate in high winds and heavy seas. It is part of the U.S. Defense Department Ballistic Missile Defense System....
- Shuttle tankerShuttle tankerA shuttle tanker is a ship designed for oil transport from an off-shore oil field. It is equipped with off-loading equipment compatible with the oil field in question...
s - Survey ships
Scope
A ship can be considered to have six degrees of freedomDegrees of freedom (engineering)
In mechanics, degrees of freedom are the set of independent displacements and/or rotations that specify completely the displaced or deformed position and orientation of the body or system...
in its motion, i.e., it can move in any of six axes.
Three of these involve translation
Translation (physics)
In physics, translation is movement that changes the position of an object, as opposed to rotation. For example, according to Whittaker:...
:
- surge (forward/astern)
- sway (starboard/port)
- heave (up/down)
and the other three rotation:
- roll (rotation about surge axis)
- pitch (rotation about sway axis)
- yaw (rotation about heave axis)
Dynamic positioning is concerned primarily with control of the ship in the horizontal plane
Horizontal plane
In geometry, physics, astronomy, geography, and related sciences, a plane is said to be horizontal at a given point if it is perpendicular to the gradient of the gravity field at that point— in other words, if apparent gravity makes a plumb bob hang perpendicular to the plane at that point.In...
, i.e., the three axis surge, sway and yaw.
Requirements
A ship that is to be used for DP requires:- to maintain position and heading, first of all the position and heading need to be known.
- a controlControl systemA control system is a device, or set of devices to manage, command, direct or regulate the behavior of other devices or system.There are two common classes of control systems, with many variations and combinations: logic or sequential controls, and feedback or linear controls...
computer to calculate the required control actions to maintain position and correct for position errors. - thrust elements to apply forces to the ship as demanded by the control system.
For most applications, the position reference systems and thrust elements must be carefully considered when designing a DP ship. In particular, for good control of position in adverse weather, the thrust capability of the ship in three axes must be adequate.
Position reference systems
There are several means to determine a ship's position at sea. Most traditional methods used for ships navigation are not accurate enough. For that reason, several positioning systemPositioning system
A positioning system is a mechanism for determining the location of an object in space. Technologies for this task exist ranging from worldwide coverage with meter accuracy to workspace coverage with sub-millimetre accuracy.- Interplanetary systems :...
s have been developed during the past decades. Producers of DP systems are: Kongsberg, Navis Engineering Oy, Converteam, EMI, Deep Down Marine Technologies, L3, MT-div.Chouest, Rolls Royce, Nautronix, and others. The applications and availability depends on the type of work and water depth. The most common Position reference/Measuring systems /Equipment (PRS/PME) are:

- DGPS, Differential GPSGlobal Positioning SystemThe Global Positioning System is a space-based global navigation satellite system that provides location and time information in all weather, anywhere on or near the Earth, where there is an unobstructed line of sight to four or more GPS satellites...
. The position obtained by GPS is not accurate enough for use by DP. The position is improved by use of a fixed ground based reference station (differential station) that compares the GPS position to the known position of the station. The correction is sent to the DGPS receiver by long wave radio frequency. For use in DP an even higher accuracy and reliability is needed. Companies such as FugroFugroFugro N.V. is a Dutch multinational company headquartered in Leidschendam. The current president is K.S. Wester.Fugro provides geotechnical, survey and geoscience services to oil, gas, mining and construction industries...
or C&C Technologies supply differential signals via satellite, enabling the combination of several differential stations. The advantage of DGPS is that it is almost always available. Disadvantages are degrading of the signal because of sunspots or atmospheric disturbances, blockage of satellites by cranes or structures and deterioration of the signal at high altitudes. There are also systems installed on vessels that use various AugmentationGNSS AugmentationAugmentation of a global navigation satellite system is a method of improving the navigation system's attributes, such as accuracy, reliability, and availability, through the integration of external information into the calculation process. There are many such systems in place and they are...
systems, as well as combining GPS position with GLONASSGLONASSGLONASS , acronym for Globalnaya navigatsionnaya sputnikovaya sistema or Global Navigation Satellite System, is a radio-based satellite navigation system operated for the Russian government by the Russian Space Forces...
.
- Acoustics. This system consists of one or more transponders placed on the seabed and a transducerTransducerA transducer is a device that converts one type of energy to another. Energy types include electrical, mechanical, electromagnetic , chemical, acoustic or thermal energy. While the term transducer commonly implies the use of a sensor/detector, any device which converts energy can be considered a...
placed in the ship's hull. The transducer sends an acoustic signal (by means of piezoelectricPiezoelectricityPiezoelectricity is the charge which accumulates in certain solid materials in response to applied mechanical stress. The word piezoelectricity means electricity resulting from pressure...
elements) to the transponder, which is triggered to reply. As the velocity of sound through water is known (preferably a soundprofile is taken regularly), the distance is known. Because there are many elements on the transducer, the direction of the signal from the transponder can be determined. Now the position of the ship relative to the transponder can be calculated. Disadvantages are the vulnerability to noise by thrusters or other acoustic systems. Furthermore, the use is limited in shallow waters because of ray bending that occurs when sound travels through water horizontally. Three types of HPR systems are commonly used: - Ultra- or Super- Short Base Line, USBL or SSBL. This works as described above. Because the angle to the transponder is measured, a correction needs to be made for the ship's roll and pitch. These are determined by Motion Reference Units. Because of the nature of angleAngleIn geometry, an angle is the figure formed by two rays sharing a common endpoint, called the vertex of the angle.Angles are usually presumed to be in a Euclidean plane with the circle taken for standard with regard to direction. In fact, an angle is frequently viewed as a measure of an circular arc...
measurement, the accuracy deteriorates with increasing water depth.
- Long Base Line, LBL. This consists of an array of at least three transponders. The initial position of the transponders is determined by USBL and/ or by measuring the baselines between the transponders. Once that is done, only the ranges to the transponders need to be measured to determine a relative position. The position should theoretically be located at the intersection of imaginary spheres, one around each transponder, with a radius equal to the time between transmission and reception multiplied by the speed of sound through water. Because angle measurement is not necessary, the accuracy in large water depths is better than USBL.
- Short Baseline, SBL. This works with an array of transducers in the ship's hull. These determine their position to a transponder, so a solution is found in the same way as with LBL. As the array is located on the ship, it needs to be corrected for roll and pitch.
- Riser Angle Monitoring. On drillships, riser angle monitoring can be fed into the DP system. It may be an electrical inclinometerInclinometerAn inclinometer or clinometer is an instrument for measuring angles of slope , elevation or depression of an object with respect to gravity...
or based on USBL, where a riser angle monitoring transponder is fitted to the riser and a remote inclinometer unit is installed on the Blow Out Preventer (BOP) and interrogated through the ship’s HPR.

- Light Taut Wire, LTW. The oldest position reference system used for DP is still very accurate in relatively shallow water. A clumpweight is lowered to the seabed. By measuring the amount of wire paid out and the angle of the wire by a gimbalGimbalA gimbal is a pivoted support that allows the rotation of an object about a single axis. A set of two gimbals, one mounted on the other with pivot axes orthogonal, may be used to allow an object mounted on the innermost gimbal to remain immobile regardless of the motion of its support...
head, the relative position can be calculated. Care should be taken not to let the wire angle become too large to avoid dragging. For deeper water the system is less favourable, as current will curve the wire. There are however systems that counteract this with a gimbal head on the clumpweight. Horizontal LTW’s are also used when operating close to a structure. Objects falling on the wire are a risk here.
- Fanbeam and CyScan. These are laser based position reference systems. They are very straightforward system, as only a small prism needs to be installed on a nearby structure or ship. Risks are the system locking on other reflecting objects and blocking of the signal. Range depends on the weather, but is typically more than 500 meters.
- Artemis. A radar based system. A unit is placed on a nearby structure and aimed at the unit on board the ship. The range is several kilometres. Advantage is the reliable, all-weather performance. Disadvantage is that the unit is rather heavy.
- DARPS, Differential, Absolute and Relative Positioning System. Commonly used on shuttle tankers while loading from a FPSOFloating Production Storage and OffloadingA floating production, storage and offloading unit is a floating vessel used by the offshore industry for the processing of hydrocarbons and for storage of oil. A FPSO vessel is designed to receive hydrocarbons produced from nearby platforms or subsea template, process them, and store oil until it...
. Both will have a GPS receiver. As the errors are the same for the both of them, the signal does not need to be corrected. The position from the FPSO is transmitted to the shuttle tanker, so a range and bearing can be calculated and fed into the DP system.
- RADius and RadaScan. These are radar based system, but have no moving parts as Artemis. Another advantage is that the transponders are much smaller than the Artemis unit. The range is typically 500 – 1000 meters.
- Inertial navigation is used in combination with any of the above reference systems, but typically with gnss (Global Navigation Satellite System) and Hydroacoustics (USBL, LBL, or SBL).
Heading reference systems
- GyrocompassGyrocompassA gyrocompass is a type of non-magnetic compass which bases on a fast-spinning disc and rotation of our planet to automatically find geographical direction...
es are normally used to determine heading.
More advanced methods are:
- Ring-Laser gyroscopes
- Fibre optic gyroscopeFibre optic gyroscopeA fibre optic gyroscope senses changes in orientation, thus performing the function of a mechanical gyroscope. However its principle of operation is instead based on the interference of light which has passed through a coil of optical fibre which can be as long as 5 km.Two beams from a laser...
s - Seapath, a combination of GPS and inertial sensors.
Reference systems
Besides position and heading, other variables are fed into the DP system through sensorSensor
A sensor is a device that measures a physical quantity and converts it into a signal which can be read by an observer or by an instrument. For example, a mercury-in-glass thermometer converts the measured temperature into expansion and contraction of a liquid which can be read on a calibrated...
s:
- Motion Reference Units, Vertical Reference Units or Vertical Reference SensorsInertial measurement unitAn inertial measurement unit, or IMU, is an electronic device that measures and reports on a craft's velocity, orientation, and gravitational forces, using a combination of accelerometers and gyroscopes. IMUs are typically used to maneuver aircraft, including UAVs, among many others, and...
, VRU's or MRU's or VRS's, determine the ship's roll, pitch and heave. - Wind sensorsAnemometerAn anemometer is a device for measuring wind speed, and is a common weather station instrument. The term is derived from the Greek word anemos, meaning wind, and is used to describe any airspeed measurement instrument used in meteorology or aerodynamics...
are fed into the DP system feed-forward, so the system can anticipate wind gusts before the ship is blown off position. - Draught sensors, since a change of draught influences the effect of wind and currentOcean currentAn ocean current is a continuous, directed movement of ocean water generated by the forces acting upon this mean flow, such as breaking waves, wind, Coriolis effect, cabbeling, temperature and salinity differences and tides caused by the gravitational pull of the Moon and the Sun...
on the hull. - Other sensors depend on the kind of ship. A pipelay ship may measure the force needed to pull on the pipe, large crane vessels will have sensors to determine the cranes position, as this changes the wind model, enabling the calculation of a more accurate model (see Control systems).
Control systems
PID controller
A proportional–integral–derivative controller is a generic control loop feedback mechanism widely used in industrial control systems – a PID is the most commonly used feedback controller. A PID controller calculates an "error" value as the difference between a measured process variable and a...
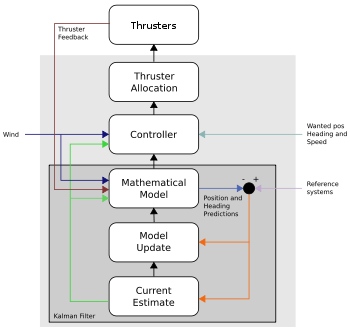
s were used and today are still used in the simpler DP systems. But modern controllers use a mathematical model
Mathematical model
A mathematical model is a description of a system using mathematical concepts and language. The process of developing a mathematical model is termed mathematical modeling. Mathematical models are used not only in the natural sciences and engineering disciplines A mathematical model is a...
of the ship that is based on a hydrodynamic and aerodynamic description concerning some of the ship's characteristics such as mass
Mass
Mass can be defined as a quantitive measure of the resistance an object has to change in its velocity.In physics, mass commonly refers to any of the following three properties of matter, which have been shown experimentally to be equivalent:...
and drag
Drag (physics)
In fluid dynamics, drag refers to forces which act on a solid object in the direction of the relative fluid flow velocity...
. Of course, this model is not entirely correct. The ship's position and heading are fed into the system and compared with the prediction made by the model. This difference is used to update the model by using Kalman filter
Kalman filter
In statistics, the Kalman filter is a mathematical method named after Rudolf E. Kálmán. Its purpose is to use measurements observed over time, containing noise and other inaccuracies, and produce values that tend to be closer to the true values of the measurements and their associated calculated...
ing technique. For this reason, the model also has input from the wind sensors and feedback from the thrusters. This method even allows not having input from any PRS for some time, depending on the quality of the model and the weather.
The accuracy and precision
Accuracy and precision
In the fields of science, engineering, industry and statistics, the accuracy of a measurement system is the degree of closeness of measurements of a quantity to that quantity's actual value. The precision of a measurement system, also called reproducibility or repeatability, is the degree to which...
of the different PRS’s is not the same. While a DGPS has a high accuracy and precision, a USBL can have a much lower precision. For this reason, the PRS’s are weighted. Based on variance
Variance
In probability theory and statistics, the variance is a measure of how far a set of numbers is spread out. It is one of several descriptors of a probability distribution, describing how far the numbers lie from the mean . In particular, the variance is one of the moments of a distribution...
a PRS receives a weight between 0 and 1.
Power and propulsion systems
To maintain position azimuth thrusterAzimuth thruster
An azimuth thruster is a configuration of ship propellers placed in pods that can be rotated in any horizontal direction, making a rudder unnecessary...
s (electric, L-drive
L-drive
An L-drive is a type of azimuth thruster in which the pod-mounted propellers are driven mechanically rather than electrically. Azimuth thruster pods can be rotated through a full 360 degrees, allowing for rapid changes in thrust direction and eliminating the need for a conventional rudder...
or Z-drive
Z-drive
A Z-drive is a type of marine propulsion unit. Specifically, it is an azimuth thruster. The pod can rotate 360 degrees allowing for rapid changes in thrust direction and thus vessel direction...
) bow thruster
Bow thruster
A bow thruster is a transversal propulsion device built into, or mounted to, the bow of a ship or boat to make it more maneuverable. Bow thrusters make docking easier, since they allow the captain to turn the vessel to port or starboard without using the main propulsion mechanism which requires...
s, stern thrusters, water jets
Pump-jet
A pump-jet, hydrojet, or water jet, is a marine system that creates a jet of water for propulsion. The mechanical arrangement may be a ducted propeller with nozzle, or a centrifugal pump and nozzle...
, rudder
Rudder
A rudder is a device used to steer a ship, boat, submarine, hovercraft, aircraft or other conveyance that moves through a medium . On an aircraft the rudder is used primarily to counter adverse yaw and p-factor and is not the primary control used to turn the airplane...
s and propeller
Propeller
A propeller is a type of fan that transmits power by converting rotational motion into thrust. A pressure difference is produced between the forward and rear surfaces of the airfoil-shaped blade, and a fluid is accelerated behind the blade. Propeller dynamics can be modeled by both Bernoulli's...
s are used. DP ships are usually at least partially diesel-electric, as this allows a more flexible set-up and is better able to handle the large changes in power demand, typical for DP operations.
The set-up depends on the DP class of the ship. A Class 1 can be relatively simple, whereas the system of a Class 3 ship is quite complex.
On Class 2 and 3 ships, all computers and reference systems should be powered through a UPS
Uninterruptible power supply
An uninterruptible power supply, also uninterruptible power source, UPS or battery/flywheel backup, is an electrical apparatus that provides emergency power to a load when the input power source, typically mains power, fails...
.
Class Requirements
Based on IMOInternational Maritime Organization
The International Maritime Organization , formerly known as the Inter-Governmental Maritime Consultative Organization , was established in Geneva in 1948, and came into force ten years later, meeting for the first time in 1959...
(International Maritime Organization) publication 645 the Classification Societies
Classification society
A classification society is a non-governmental organization that establishes and maintains technical standards for the construction and operation of ships and offshore structures...
have issued rules for Dynamic Positioned Ships described as Class 1, Class 2 and Class 3.
- Equipment Class 1 has no redundancy.
Loss of position may occur in the event of a single fault.
- Equipment Class 2 has redundancy so that no single fault in an active system will cause the system to fail.
Loss of position should not occur from a single fault of an active component or system such as generators, thruster, switchboards, remote controlled valves etc., but may occur after failure of a static component such as cables, pipes, manual valves etc.
- Equipment Class 3 which also has to withstand fire or flood in any one compartment without the system failing.
Loss of position should not occur from any single failure including a completely burnt fire sub division or flooded watertight compartment.
Classification Societies have their own Class notations:
| Description | IMO International Maritime Organization The International Maritime Organization , formerly known as the Inter-Governmental Maritime Consultative Organization , was established in Geneva in 1948, and came into force ten years later, meeting for the first time in 1959... Equipment Class |
LR Lloyd's Register The Lloyd's Register Group is a maritime classification society and independent risk management organisation providing risk assessment and mitigation services and management systems certification. Historically, as Lloyd's Register of Shipping, it was a specifically maritime organisation... Equipment Class |
DNV Det Norske Veritas Stiftelsen Det Norske Veritas is a classification society organized as a foundation, with the objective of "Safeguarding life, property, and the environment". The organization's history goes back to 1864, when the foundation was established in Norway to inspect and evaluate the technical condition... Equipment Class |
GL Germanischer Lloyd The Germanischer Lloyd SE is a classification society based in the city of Hamburg, Germany. As a technical supervisory organization Germanischer Lloyd conducts safety surveys on more than 7,000 ships with over 100 Mio GT... Equipment Class |
ABS American Bureau of Shipping The American Bureau of Shipping is a classification society, with a mission to promote the security of life, property and the natural environment, primarily through the development and verification of standards for the design, construction and operational maintenance of marine-related facilities... Equipment Class |
| Manual position control and automatic heading control under specified maximum environmental conditions | - | DP(CM) | DYNPOS-AUTS | - | - |
| Automatic and manual position and heading control under specified maximum environmental conditions | Class 1 | DP(AM) | DYNPOS-AUT | DP 1 | DPS-0, DPS-1 |
| Automatic and manual position and heading control under specified maximum environmental conditions, during and following any single fault excluding loss of a compartment. (Two independent computer systems). | Class 2 | DP(AA) | DYNPOS-AUTR | DP 2 | DPS-2 |
| Automatic and manual position and heading control under specified maximum environmental conditions, during and following any single fault including loss of a compartment due to fire or flood. (At least two independent computer systems with a separate backup system separated by A60 class division). | Class 3 | DP(AAA) | DYNPOS-AUTRO | DP 3 | DPS-3 |
NMD
Where IMO leaves the decision of which Class applies to what kind of operation to the operator of the DP ship and its client, the Norwegian Maritime Directorate (NMD) has specified what Class should be used in regard to the risk of an operation. In the NMD Guidelines and Notes No. 28, enclosure A four classes are defined:- Class 0 Operations where loss of position keeping capability is not considered to endanger human lives, or cause damage.
- Class 1 Operations where loss of position keeping capability may cause damage or pollution of small consequence.
- Class 2 Operations where loss of position keeping capability may cause personnel injury, pollution, or damage with large economic consequences.
- Class 3 Operations where loss of position keeping capability may cause fatal accidents, or severe pollution or damage with major economic consequences.
Based on this the type of ship is specified for each operation:
- Class 1 DP units with equipment class 1 should be used during operations where loss of position is not considered to endanger human lives, cause significant damage or cause more than minimal pollution.
- Class 2 DP units with equipment class 2 should be used during operations where loss of position could cause personnel injury, pollution or damage with great economic consequences.
- Class 3 DP units with equipment class 3 should be used during operations where loss of position could cause fatal accidents, severe pollution or damage with major economic consequences.
Redundancy
RedundancyRedundancy (engineering)
In engineering, redundancy is the duplication of critical components or functions of a system with the intention of increasing reliability of the system, usually in the case of a backup or fail-safe....
is the ability to cope with a single failure without loss of position. A single failure can be, amongst others:
- Thruster failure
- Generator failure
- Powerbus failure (when generators are combined on one powerbus)
- Control computer failure
- Position reference system failure
- Reference system failure
For certain operations redundancy is not required. For instance, if a survey ship loses its DP capability, there is normally no risk of damage or injuries. These operations will normally be done in Class 1.
For other operations, such as diving and heavy lifting, there is a risk of damage or injuries. Depending on the risk, the operation is done in Class 2 or 3. This means at least three Position reference systems should be selected. This allows the principle of voting logic, so the failing PRS can be found. For this reason, there are also three DP control computers, three gyrocompasses, three MRU’s and three wind sensors on Class 3 ships. If a single fault occurs that jeopardizes the redundancy, i.e., failing of a thruster, generator or a PRS, and this cannot be resolved immediately, the operation should be abandoned as quickly as possible.
To have sufficient redundancy, enough generators and thrusters should be on-line so the failure of one does not result in a loss of position. This is left to the judgement of the DP operator. For Class 2 and Class 3 a Consequence Analyses should be incorporated in the system to assist the DPO in this process.
Disadvantage is that a generator can never operate at full load, resulting in less economy and fouling of the engines.
The redundancy of a DP ship should be judged by a failure mode and effects analysis (FMEA)
Failure mode and effects analysis
A failure modes and effects analysis is a procedure in product development and operations management for analysis of potential failure modes within a system for classification by the severity and likelihood of the failures...
study and proved by FMEA trials. Besides that, annual trials are done and normally DP function tests are completed prior to each project.
DP Operator
The DP operator (DPO) judges whether there is enough redundancy available at any given moment of the operation. IMO issued MSC/Circ.738 (Guidelines for dynamic positioning system (DP) operator training) on 24-06-1996. This refers to IMCA (International Marine Contractors Association) M 117 as acceptable standard.To qualify as a DP operator the following path should be followed:
- a DP Induction course
- a minimum of 30 days seagoing DP familiarisation
- a DP Advanced course
- a minimum of 180 days watchkeeping on a DP ship
- a statement of suitability by the master of a DP ship
When the watchkeeping is done on a Class 1 DP ship, a limited certificate will be issued; otherwise a full certificate will be issued.
The DP Training and Certification scheme is operated by The Nautical Institute (NI). The NI issue logbooks to trainees, they accredit training centres and control the issuance of certification.
With ever more DP ships and with increasing manpower demands, the position of DPO is gaining increasing prominence. This shifting landscape led to the creation of The International Dynamic Positioning Operators Association (IDPOA) in 2009. www.dpoperators.org
IDPOA membership is made up of certified DPO's who qualify for fellowship (fDPO), while Members (mDPO) are those with DP experience or who may already be working within the DP certification scheme.
IMCA
The International Marine Contractors AssociationInternational Marine Contractors Association
The International Marine Contractors Association is the international trade association representing offshore, marine, and underwater engineering companies....
was formed in April 1995 from the amalgamation of AODC (originally the International Association of Offshore Diving Contractors), founded in 1972, and DPVOA (the Dynamic Positioning Vessel Owners Association), founded in 1990. It represents offshore, marine and underwater engineering contractors. Acergy
Acergy
Acergy S.A. was an international offshore seabed to surface engineering and construction company previously known as Stolt Offshore and Stolt Comex Seaway and was part of the Stolt-Nielsen Group until 2005...
, Allseas
Allseas
Allseas Group SA is one of the largest offshore pipelay companies with 2000 employees. The company is privately owned by founder Edward Heerema....
, Heerema Marine Contractors
Heerema Marine Contractors
Heerema Marine Contractors is a contractor most notable for operation of three of the largest crane vessels in the offshore industry.-History:...
, Helix Energy Solutions Group, J. Ray McDermott
J. Ray McDermott
McDermott International is an international engineering company specialized on marine solutions with operations in the Americas, Middle East, the Caspian Sea, and the Pacific Rim...
, Saipem
Saipem
Saipem S.p.A. is an Italian oil and gas industry contractor. It is a subsidiary of Italian energy company Eni, which owns approximately 43% of Saipem's shares. Saipem has contracted for designing and constructing several pipelines, including Blue Stream, Greenstream, Nord Stream and South...
, Subsea 7
Subsea 7
Subsea 7 S.A. is a subsea engineering and construction company. Registered in Luxembourg and with its headquarters in London in the United Kingdom, the firm assumed its current form in January 2011 when Acergy S.A...
and Technip
Technip
Technip is a provider of project management, engineering, and construction services for the oil and gas industry, headquartered in Paris, France....
have representation on IMCA's Council and provide the president. Previous presidents are:
- 1995-6 - Derek Leach, Coflexip Stena Offshore
- 1997-8 - Hein Mulder, Heerema Marine Contractors
- 1999/2000 - Donald Carmichael, Coflexip Stena Offshore
- 2001-2 - John Smith, Halliburton Subsea/Subsea 7
- 2003-4 - Steve Preston, - Heerema Marine Contractors
- 2005 - Frits Janmaat, Allseas Group
While it started with the collection and analysis of DP Incidents, since then it has produced publications on different subjects to improve standards for DP systems. It also works with IMO and other regulatory bodies.
External links
- List of all offshore vessels
- IMO, International Maritime Organization
- Introduction to Dynamic Positioning by the International Marine Contractors Association (IMCA)
- NMD, Norwegian Maritime Directorate
- OPL Oilfield Seamanship Series - Volume 9: Dynamic Positioning - 2nd Edition by David Bray
- NI, The Nautical Institute
- The Dynamic Positioning Committee of The Marine Technology Society
- The International Dynamic Positioning Operators Association (IDPOA)