

Sussman Anomaly
Encyclopedia
The Sussman Anomaly is a problem in artificial intelligence
, first described by Gerald Sussman, that illustrates a weakness of noninterleaved planning
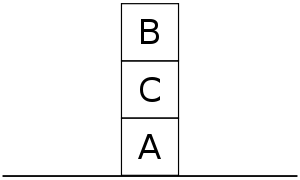
algorithms, which were prominent in the early 1970s. In the problem, three blocks (labeled A, B, and C) rest on a table. The agent must stack the blocks such that A is atop B, which in turn is atop C. However, it may only move one block at a time. The problem starts with B on the table, C atop A, and A on the table:
 However, noninterleaved planners typically separate the goal (stack A atop B atop C) into subgoals, such as:
However, noninterleaved planners typically separate the goal (stack A atop B atop C) into subgoals, such as:
Suppose the planner starts by pursuing Goal 1. The straightforward solution is to move C out of the way, then move A atop B. But while this sequence accomplishes Goal 1, the agent cannot now pursue Goal 2 without undoing Goal 1, since both A and B must be moved atop C:
 If instead the planner starts with Goal 2, the most efficient solution is to move B. But again, the planner cannot pursue Goal 1 without undoing Goal 2:
If instead the planner starts with Goal 2, the most efficient solution is to move B. But again, the planner cannot pursue Goal 1 without undoing Goal 2:
 The problem was first identified by Sussman as a part of his PhD research. Sussman (and his supervisor, Marvin Minsky
The problem was first identified by Sussman as a part of his PhD research. Sussman (and his supervisor, Marvin Minsky
) believed that intelligence requires a list of exceptions or tricks, and developed a modular planning system for "debugging" plans. Most modern planning systems can handle this anomaly, but it is still useful for explaining why planning is non-trivial.
Artificial intelligence
Artificial intelligence is the intelligence of machines and the branch of computer science that aims to create it. AI textbooks define the field as "the study and design of intelligent agents" where an intelligent agent is a system that perceives its environment and takes actions that maximize its...
, first described by Gerald Sussman, that illustrates a weakness of noninterleaved planning
Noninterleaved planning
A noninterleaved planner is a planner that, when given two subgoals G1 and G2, produces either a plan for G1 concatenated with a plan for G2, or vice versa....
algorithms, which were prominent in the early 1970s. In the problem, three blocks (labeled A, B, and C) rest on a table. The agent must stack the blocks such that A is atop B, which in turn is atop C. However, it may only move one block at a time. The problem starts with B on the table, C atop A, and A on the table:
- get A atop B
- get B atop C
Suppose the planner starts by pursuing Goal 1. The straightforward solution is to move C out of the way, then move A atop B. But while this sequence accomplishes Goal 1, the agent cannot now pursue Goal 2 without undoing Goal 1, since both A and B must be moved atop C:
Marvin Minsky
Marvin Lee Minsky is an American cognitive scientist in the field of artificial intelligence , co-founder of Massachusetts Institute of Technology's AI laboratory, and author of several texts on AI and philosophy.-Biography:...
) believed that intelligence requires a list of exceptions or tricks, and developed a modular planning system for "debugging" plans. Most modern planning systems can handle this anomaly, but it is still useful for explaining why planning is non-trivial.
Sources
- G.J. Sussman (1975) A Computer Model of Skill Acquisition Elsevier Science Inc. New York, NY, USA. Book version of his PhD thesis.