Underwater acoustic communication
Encyclopedia
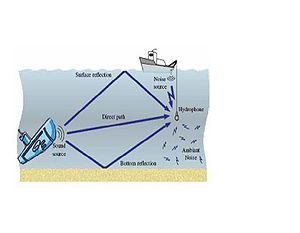
Hydrophone
A hydrophone is a microphone designed to be used underwater for recording or listening to underwater sound. Most hydrophones are based on a piezoelectric transducer that generates electricity when subjected to a pressure change...
s. Under water communication is difficult due to factors like multi-path propagation
Radio propagation
Radio propagation is the behavior of radio waves when they are transmitted, or propagated from one point on the Earth to another, or into various parts of the atmosphere...
, time variations of the channel, small available bandwidth and strong signal attenuation
Attenuation
In physics, attenuation is the gradual loss in intensity of any kind of flux through a medium. For instance, sunlight is attenuated by dark glasses, X-rays are attenuated by lead, and light and sound are attenuated by water.In electrical engineering and telecommunications, attenuation affects the...
, especially over long ranges. In underwater communication there are low data rates compared to terrestrial communication, since underwater communication uses acoustic wave
Acoustic wave
Acoustic waves are a type of longitudinal waves that propagate by means of adiabatic compression and decompression. Longitudinal waves are waves that have the same direction of vibration as their direction of travel. Important quantities for describing acoustic waves are sound pressure, particle...
s instead of electromagnetic waves.
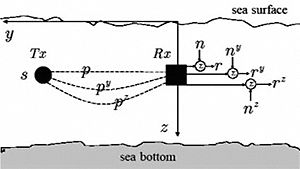
Use of vector sensor receivers
A vector sensor is capable of measuring important non-scalar components of the acoustic field such as the wave velocity, which cannot be obtained by a single scalar pressure sensor.In recent decades, extensive research has been conducted on the theory and design of vector sensors. Many vector sensor signal processing algorithms have been designed . They have been mainly used for underwater target localization and SONAR
Sonar
Sonar is a technique that uses sound propagation to navigate, communicate with or detect other vessels...
applications.
Earlier underwater acoustic communication systems have been relying on scalar sensors only, which measure the pressure of the acoustic field. Vector sensors measure the scalar and vector components of the acoustic field in a single point in space, therefore can serve as a compact multichannel receiver. This is different from the existing multichannel underwater receivers, which are composed of spatially separated pressure-only sensors, which may result in large-size arrays.
In general, there are two types of vector sensors: inertial and gradient. Inertial sensors truly measure the velocity or acceleration by responding to the acoustic medium motion, whereas gradient sensors employ a finite-difference approximation to estimate the gradients of the acoustic field such as velocity and acceleration.