

AA tree
Encyclopedia
An AA tree in computer science
is a form of balanced tree
used for storing and retrieving ordered data efficiently. AA trees are named for Arne Andersson, their inventor.
AA trees are a variation of the red-black tree
, which in turn is an enhancement to the binary search tree
. Unlike red-black trees, red nodes on an AA tree can only be added as a right subchild. In other words, no red node can be a left sub-child. This results in the simulation of a 2-3 tree
instead of a 2-3-4 tree
, which greatly simplifies the maintenance operations. The maintenance algorithms for a red-black tree need to consider seven different shapes to properly balance the tree:

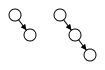
An AA tree on the other hand only needs to consider two shapes due to the strict requirement that only right links can be red:
A link where the child's level is equal to that of its parent is called a horizontal link, and can be thought of as a red link in the red-black tree context. Right horizontal links are allowed as long as there are never two consecutive horizontal right links; left horizontal links are always forbidden.
Only two operations are needed for maintaining balance in an AA tree. These operations are called skew and split. Skew is a right rotation when an insertion or deletion creates a left horizontal link. Split is a conditional left rotation when an insertion or deletion creates two horizontal right links, which once again corresponds to two consecutive red links in red-black trees.
function skew is
input: T, a node representing an AA tree that needs to be rebalanced.
output: Another node representing the rebalanced AA tree.
if nil(T) then
return Nil
else if level(left(T)) level(T) then
Swap the pointers of horizontal left links.
L = left(T)
left(T) := right(L)
right(L) := T
return L
else
return T
end if
end function
Skew: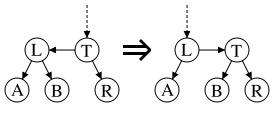
function split is
input: T, a node representing an AA tree that needs to be rebalanced.
output: Another node representing the rebalanced AA tree.
if nil(T) then
return Nil
else if level(T) level(right(right(T))) then
We have two horizontal right links. Take the middle node, elevate it, and return it.
R = right(T)
right(T) := left(R)
left(R) := T
level(R) := level(R) + 1
return R
else
return T
end if
end function
Split: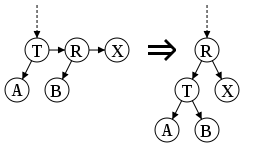
function insert is
input: X, the value to be inserted, and T, the root of the tree to insert it into.
output: A balanced version T including X.
Do the normal binary tree insertion procedure. Set the result of the
recursive call to the correct child in case a new node was created or the
root of the subtree changes.
if nil(T) then
Create a new leaf node with X.
return node(X, 1, Nil, Nil)
else if X < value(T) then
left(T) := insert(X, left(T))
else if X > value(T) then
right(T) := insert(X, right(T))
end if
Note that the case of X value(T) is unspecified. As given, an insert
will have no effect. The implementor may desire different behavior.
Perform skew and then split. The conditionals that determine whether or
not a rotation will occur or not are inside of the procedures, as given
above.
T := skew(T)
T := split(T)
return T
end function
Deletion
As in most balanced binary trees, the deletion of an internal node can be turned into the deletion of a leaf node by swapping the internal node with either its closest predecessor or successor, depending on which are in the tree or on the implementor's whims. Retrieving a predecessor is simply a matter of following one left link and then all of the remaining right links. Similarly, the successor can be found by going right once and left until a null pointer is found. Because of the AA property of all nodes of level greater than one having two children, the successor or predecessor node will be in level 1, making their removal trivial.
To re-balance a tree, there are a few approaches. The one described by Andersson in his original paper is the simplest, and it is described here, although actual implementations may opt for a more optimized approach. After a removal, the first step to maintaining tree validity is to lower the level of any nodes whose children are two levels below them, or who are missing children. Then, the entire level must be skewed and split. This approach was favored, because when laid down conceptually, it has three easily understood separate steps:
However, we have to skew and split the entire level this time instead of just a node, complicating our code.
function delete is
input: X, the value to delete, and T, the root of the tree from which it should be deleted.
output: T, balanced, without the value X.
if X > value(T) then
right(T) := delete(X, right(T))
else if X < value(T) then
left(T) := delete(X, left(T))
else
If we're a leaf, easy, otherwise reduce to leaf case.
if leaf(T) then
return Nil
else if nil(left(T)) then
L := successor(T)
right(T) := delete(L, right(T))
value(T) := L
else
L := predecessor(T)
left(T) := delete(L, left(T))
value(T) := L
end if
end if
Rebalance the tree. Decrease the level of all nodes in this level if
necessary, and then skew and split all nodes in the new level.
T := decrease_level(T)
T := skew(T)
right(T) := skew(right(T))
right(right(T)) := skew(right(right(T)))
T := split(T)
right(T) := split(right(T))
return T
end function
function decrease_level is
input: T, a tree for which we want to remove links that skip levels.
output: T with its level decreased.
should_be = min(level(left(T)), level(right(T))) + 1
if should_be < level(T) then
level(T) := should_be
if should_be < level(right(T)) then
level(right(T)) := should_be
end if
end if
return T
end function
A good example of deletion by this algorithm is present in the Andersson paper.
Performance
The performance of an AA tree is equivalent to the performance of a red-black tree. While an AA tree makes more rotations than a red-black tree, the simpler algorithms tend to be faster, and all of this balances out to result in similar performance. A red-black tree is more consistent in its performance than an AA tree, but an AA tree tends to be flatter, which results in slightly faster search times.
External links
Computer science
Computer science or computing science is the study of the theoretical foundations of information and computation and of practical techniques for their implementation and application in computer systems...
is a form of balanced tree
Self-balancing binary search tree
In computer science, a self-balancing binary search tree is any node based binary search tree that automatically keeps its height small in the face of arbitrary item insertions and deletions....
used for storing and retrieving ordered data efficiently. AA trees are named for Arne Andersson, their inventor.
AA trees are a variation of the red-black tree
Red-black tree
A red–black tree is a type of self-balancing binary search tree, a data structure used in computer science, typically to implement associative arrays. The original structure was invented in 1972 by Rudolf Bayer and named "symmetric binary B-tree," but acquired its modern name in a paper in 1978 by...
, which in turn is an enhancement to the binary search tree
Binary search tree
In computer science, a binary search tree , which may sometimes also be called an ordered or sorted binary tree, is a node-based binary tree data structurewhich has the following properties:...
. Unlike red-black trees, red nodes on an AA tree can only be added as a right subchild. In other words, no red node can be a left sub-child. This results in the simulation of a 2-3 tree
2-3 tree
In computer science, a 2-3 tree is a type of data structure, a tree where every node with children has either two children and one data element or three children and two data elements...
instead of a 2-3-4 tree
2-3-4 tree
In computer science, a 2-3-4 tree is a self-balancing data structure that is commonly used to implement dictionaries...
, which greatly simplifies the maintenance operations. The maintenance algorithms for a red-black tree need to consider seven different shapes to properly balance the tree:
An AA tree on the other hand only needs to consider two shapes due to the strict requirement that only right links can be red:
Balancing Rotations
Typically, AA trees are implemented with levels instead of colors, unlike red-black trees. Each node has a level field, and the following invariants must remain true for the tree to be valid:- The level of a leaf node is one.
- The level of a left child is strictly less than that of its parent.
- The level of a right child is less than or equal to that of its parent.
- The level of a right grandchild is strictly less than that of its grandparent.
- Every node of level greater than one must have two children.
A link where the child's level is equal to that of its parent is called a horizontal link, and can be thought of as a red link in the red-black tree context. Right horizontal links are allowed as long as there are never two consecutive horizontal right links; left horizontal links are always forbidden.
Only two operations are needed for maintaining balance in an AA tree. These operations are called skew and split. Skew is a right rotation when an insertion or deletion creates a left horizontal link. Split is a conditional left rotation when an insertion or deletion creates two horizontal right links, which once again corresponds to two consecutive red links in red-black trees.
function skew is
input: T, a node representing an AA tree that needs to be rebalanced.
output: Another node representing the rebalanced AA tree.
if nil(T) then
return Nil
else if level(left(T)) level(T) then
Swap the pointers of horizontal left links.
L = left(T)
left(T) := right(L)
right(L) := T
return L
else
return T
end if
end function
Skew:
function split is
input: T, a node representing an AA tree that needs to be rebalanced.
output: Another node representing the rebalanced AA tree.
if nil(T) then
return Nil
else if level(T) level(right(right(T))) then
We have two horizontal right links. Take the middle node, elevate it, and return it.
R = right(T)
right(T) := left(R)
left(R) := T
level(R) := level(R) + 1
return R
else
return T
end if
end function
Split:
Insertion
Insertion begins with the normal binary tree search and insertion procedure. Then, as the call stack unwinds (assuming a recursive implementation of the search), it's easy to check the validity of the tree and perform any rotations as necessary. If a horizontal left link arises, a skew will be performed, and if two horizontal right links arise, a split will be performed, possibly incrementing the level of the new root node of the current subtree. Note, in the code as given above, the increment of level(T). This makes it necessary to continue checking the validity of the tree as the modifications bubble up from the leaves.function insert is
input: X, the value to be inserted, and T, the root of the tree to insert it into.
output: A balanced version T including X.
Do the normal binary tree insertion procedure. Set the result of the
recursive call to the correct child in case a new node was created or the
root of the subtree changes.
if nil(T) then
Create a new leaf node with X.
return node(X, 1, Nil, Nil)
else if X < value(T) then
left(T) := insert(X, left(T))
else if X > value(T) then
right(T) := insert(X, right(T))
end if
Note that the case of X value(T) is unspecified. As given, an insert
will have no effect. The implementor may desire different behavior.
Perform skew and then split. The conditionals that determine whether or
not a rotation will occur or not are inside of the procedures, as given
above.
T := skew(T)
T := split(T)
return T
end function
Deletion
As in most balanced binary trees, the deletion of an internal node can be turned into the deletion of a leaf node by swapping the internal node with either its closest predecessor or successor, depending on which are in the tree or on the implementor's whims. Retrieving a predecessor is simply a matter of following one left link and then all of the remaining right links. Similarly, the successor can be found by going right once and left until a null pointer is found. Because of the AA property of all nodes of level greater than one having two children, the successor or predecessor node will be in level 1, making their removal trivial.
To re-balance a tree, there are a few approaches. The one described by Andersson in his original paper is the simplest, and it is described here, although actual implementations may opt for a more optimized approach. After a removal, the first step to maintaining tree validity is to lower the level of any nodes whose children are two levels below them, or who are missing children. Then, the entire level must be skewed and split. This approach was favored, because when laid down conceptually, it has three easily understood separate steps:
- Decrease the level, if appropriate.
- Skew the level.
- Split the level.
However, we have to skew and split the entire level this time instead of just a node, complicating our code.
function delete is
input: X, the value to delete, and T, the root of the tree from which it should be deleted.
output: T, balanced, without the value X.
if X > value(T) then
right(T) := delete(X, right(T))
else if X < value(T) then
left(T) := delete(X, left(T))
else
If we're a leaf, easy, otherwise reduce to leaf case.
if leaf(T) then
return Nil
else if nil(left(T)) then
L := successor(T)
right(T) := delete(L, right(T))
value(T) := L
else
L := predecessor(T)
left(T) := delete(L, left(T))
value(T) := L
end if
end if
Rebalance the tree. Decrease the level of all nodes in this level if
necessary, and then skew and split all nodes in the new level.
T := decrease_level(T)
T := skew(T)
right(T) := skew(right(T))
right(right(T)) := skew(right(right(T)))
T := split(T)
right(T) := split(right(T))
return T
end function
function decrease_level is
input: T, a tree for which we want to remove links that skip levels.
output: T with its level decreased.
should_be = min(level(left(T)), level(right(T))) + 1
if should_be < level(T) then
level(T) := should_be
if should_be < level(right(T)) then
level(right(T)) := should_be
end if
end if
return T
end function
A good example of deletion by this algorithm is present in the Andersson paper.
Performance
The performance of an AA tree is equivalent to the performance of a red-black tree. While an AA tree makes more rotations than a red-black tree, the simpler algorithms tend to be faster, and all of this balances out to result in similar performance. A red-black tree is more consistent in its performance than an AA tree, but an AA tree tends to be flatter, which results in slightly faster search times.
External links
- A. Andersson. Balanced search trees made simple
- A. Andersson. A note on searching in a binary search tree
- AA-Tree Applet by Kubo Kovac
- BSTlib - Open source AA tree library for C by trijezdci
- AA Visual 2007 1.5 - OpenSource Delphi program for educating AA tree structures
- Thorough tutorial Julienne Walker with lots of code, including a practical implementation
- Object Oriented implementation with tests
- A Disquisition on The Performance Behavior of Binary Search Tree Data Structures (pages 67-75) - Comparison of AA trees, red-black trees, treaps, skip lists, and radix trees
- An example C implementation
- An Objective-C implementation