
Adaptive filter
Encyclopedia
An adaptive filter is a filter that self-adjusts its transfer function
according to an optimization algorithm driven by an error signal. Because of the complexity of the optimization algorithms, most adaptive filters are digital filter
s. By way of contrast, a non-adaptive filter has a static transfer function. Adaptive filters are required for some applications because some parameters of the desired processing operation (for instance, the locations of reflective surfaces in a reverberant space) are not known in advance. The adaptive filter uses feedback in the form of an error signal to refine its transfer function to match the changing parameters.
Generally speaking, the adaptive process involves the use of a cost function, which is a criterion for optimum performance of the filter, to feed an algorithm, which determines how to modify filter transfer function to minimize the cost on the next iteration.
As the power of digital signal processor
s has increased, adaptive filters have become much more common and are now routinely used in devices such as mobile phones and other communication devices, camcorders and digital cameras, and medical monitoring equipment.
is recording a heart beat (an ECG), which is being corrupted by a 50 Hz
noise (the frequency coming from the power supply
in many countries). However, due to slight variations in the power supply to the hospital, the noise signal may contain harmonics of the noise and the exact frequency of the noise may vary.
One way to remove the noise is to filter the signal with a notch filter at 50 Hz. Such a static filter would need to remove all the frequencies in the vicinity of 50 Hz, which could excessively degrade the quality of the ECG since the heart beat would also likely have frequency components in the rejected range.
To circumvent this potential loss of information, an adaptive filter could be used. The adaptive filter would take input both from the patient and from the power supply directly and would thus be able to track the actual frequency of the noise as it fluctuates. Such an adaptive technique generally allows for a filter with a smaller rejection range, which means, in our case, that the quality of the output signal is more accurate for medical diagnoses.
and Recursive Least Squares (RLS)
. The idea behind the block diagram is that a variable filter extracts an estimate of the desired signal.
To start the discussion of the block diagram we take the following assumptions:
The variable filter estimates the desired signal by convolving the input signal with the impulse response. In vector notation this is expressed as
where
is an input signal vector. Moreover, the variable filter updates the filter coefficients at every time instant
where is a correction factor for the filter coefficients. The adaptive algorithm generates this correction factor based on the input and error signals. LMS and RLS define two different coefficient update algorithms.
is a correction factor for the filter coefficients. The adaptive algorithm generates this correction factor based on the input and error signals. LMS and RLS define two different coefficient update algorithms.
Transfer function
A transfer function is a mathematical representation, in terms of spatial or temporal frequency, of the relation between the input and output of a linear time-invariant system. With optical imaging devices, for example, it is the Fourier transform of the point spread function i.e...
according to an optimization algorithm driven by an error signal. Because of the complexity of the optimization algorithms, most adaptive filters are digital filter
Digital filter
In electronics, computer science and mathematics, a digital filter is a system that performs mathematical operations on a sampled, discrete-time signal to reduce or enhance certain aspects of that signal. This is in contrast to the other major type of electronic filter, the analog filter, which is...
s. By way of contrast, a non-adaptive filter has a static transfer function. Adaptive filters are required for some applications because some parameters of the desired processing operation (for instance, the locations of reflective surfaces in a reverberant space) are not known in advance. The adaptive filter uses feedback in the form of an error signal to refine its transfer function to match the changing parameters.
Generally speaking, the adaptive process involves the use of a cost function, which is a criterion for optimum performance of the filter, to feed an algorithm, which determines how to modify filter transfer function to minimize the cost on the next iteration.
As the power of digital signal processor
Digital signal processor
A digital signal processor is a specialized microprocessor with an architecture optimized for the fast operational needs of digital signal processing.-Typical characteristics:...
s has increased, adaptive filters have become much more common and are now routinely used in devices such as mobile phones and other communication devices, camcorders and digital cameras, and medical monitoring equipment.
Example application
Suppose a hospitalHospital
A hospital is a health care institution providing patient treatment by specialized staff and equipment. Hospitals often, but not always, provide for inpatient care or longer-term patient stays....
is recording a heart beat (an ECG), which is being corrupted by a 50 Hz
Hertz
The hertz is the SI unit of frequency defined as the number of cycles per second of a periodic phenomenon. One of its most common uses is the description of the sine wave, particularly those used in radio and audio applications....
noise (the frequency coming from the power supply
Power supply
A power supply is a device that supplies electrical energy to one or more electric loads. The term is most commonly applied to devices that convert one form of electrical energy to another, though it may also refer to devices that convert another form of energy to electrical energy...
in many countries). However, due to slight variations in the power supply to the hospital, the noise signal may contain harmonics of the noise and the exact frequency of the noise may vary.
One way to remove the noise is to filter the signal with a notch filter at 50 Hz. Such a static filter would need to remove all the frequencies in the vicinity of 50 Hz, which could excessively degrade the quality of the ECG since the heart beat would also likely have frequency components in the rejected range.
To circumvent this potential loss of information, an adaptive filter could be used. The adaptive filter would take input both from the patient and from the power supply directly and would thus be able to track the actual frequency of the noise as it fluctuates. Such an adaptive technique generally allows for a filter with a smaller rejection range, which means, in our case, that the quality of the output signal is more accurate for medical diagnoses.
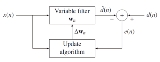
Block diagram
The block diagram, shown in the following figure, serves as a foundation for particular adaptive filter realisations, such as Least Mean Squares (LMS)Least mean squares filter
Least mean squares algorithms are a class of adaptive filter used to mimic a desired filter by finding the filter coefficients that relate to producing the least mean squares of the error signal . It is a stochastic gradient descent method in that the filter is only adapted based on the error at...
and Recursive Least Squares (RLS)
Recursive least squares filter
The Recursive least squares adaptive filter is an algorithm which recursively finds the filter coefficients that minimize a weighted linear least squares cost function relating to the input signals. This is in contrast to other algorithms such as the least mean squares that aim to reduce the...
. The idea behind the block diagram is that a variable filter extracts an estimate of the desired signal.
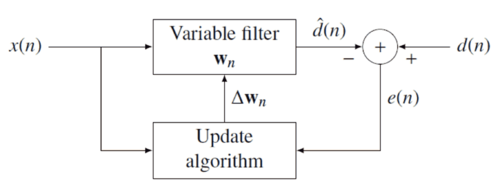
To start the discussion of the block diagram we take the following assumptions:
- The input signal is the sum of a desired signal
 and interfering noise
and interfering noise 

- The variable filter has a Finite Impulse Response (FIR)Finite impulse responseA finite impulse response filter is a type of a signal processing filter whose impulse response is of finite duration, because it settles to zero in finite time. This is in contrast to infinite impulse response filters, which have internal feedback and may continue to respond indefinitely...
structure. For such structures the impulse response is equal to the filter coefficients. The coefficients for a filter of order are defined as
are defined as .
. - The error signal or cost function is the difference between the desired and the estimated signal

The variable filter estimates the desired signal by convolving the input signal with the impulse response. In vector notation this is expressed as
where
is an input signal vector. Moreover, the variable filter updates the filter coefficients at every time instant
where
is a correction factor for the filter coefficients. The adaptive algorithm generates this correction factor based on the input and error signals. LMS and RLS define two different coefficient update algorithms.Applications of adaptive filters
- Noise cancellation
- Signal predictionLinear predictionLinear prediction is a mathematical operation where future values of a discrete-time signal are estimated as a linear function of previous samples....
- Adaptive feedback cancellationAdaptive feedback cancellationAdaptive feedback cancellation is a common method of cancelling audio feedback in a varietyof electro-acoustic systems such as digital hearing aids. The time varying acoustic feedback leakage paths can only be eliminated with adaptive feedback cancellation...
- Echo cancellationEcho cancellation'The term echo cancellation is used in telephony to describe the process of removing echo from a voice communication in order to improve voice quality on a telephone call...
Filter implementations
- Least mean squares filterLeast mean squares filterLeast mean squares algorithms are a class of adaptive filter used to mimic a desired filter by finding the filter coefficients that relate to producing the least mean squares of the error signal . It is a stochastic gradient descent method in that the filter is only adapted based on the error at...
- Recursive least squares filterRecursive least squares filterThe Recursive least squares adaptive filter is an algorithm which recursively finds the filter coefficients that minimize a weighted linear least squares cost function relating to the input signals. This is in contrast to other algorithms such as the least mean squares that aim to reduce the...
- Multidelay block frequency domain adaptive filterMultidelay block frequency domain adaptive filterThe Multidelay block frequency domain adaptive filter algorithm is a block-based frequency domain implementation of the Least mean squares filter algorithm.- Introduction :...
See also
- Kalman filterKalman filterIn statistics, the Kalman filter is a mathematical method named after Rudolf E. Kálmán. Its purpose is to use measurements observed over time, containing noise and other inaccuracies, and produce values that tend to be closer to the true values of the measurements and their associated calculated...
- Wiener filterWiener filterIn signal processing, the Wiener filter is a filter proposed by Norbert Wiener during the 1940s and published in 1949. Its purpose is to reduce the amount of noise present in a signal by comparison with an estimation of the desired noiseless signal. The discrete-time equivalent of Wiener's work was...
- Linear predictionLinear predictionLinear prediction is a mathematical operation where future values of a discrete-time signal are estimated as a linear function of previous samples....
- Filter (signal processing)Filter (signal processing)In signal processing, a filter is a device or process that removes from a signal some unwanted component or feature. Filtering is a class of signal processing, the defining feature of filters being the complete or partial suppression of some aspect of the signal...
- Kernel adaptive filterKernel adaptive filterKernel adaptive filtering is an adaptive filtering technique for general nonlinear problems. It is a natural generalization of linear adaptive filtering in reproducing kernel Hilbert spaces. Kernel adaptive filters are online kernel methods, closely related to some artificial neural networks such...
- weiner-hopf equation