

Rotation (mathematics)
Encyclopedia
Geometry
Geometry arose as the field of knowledge dealing with spatial relationships. Geometry was one of the two fields of pre-modern mathematics, the other being the study of numbers ....
and linear algebra
Linear algebra
Linear algebra is a branch of mathematics that studies vector spaces, also called linear spaces, along with linear functions that input one vector and output another. Such functions are called linear maps and can be represented by matrices if a basis is given. Thus matrix theory is often...
, a rotation is a transformation in a plane or in space that describes the motion of a rigid body
Rigid body
In physics, a rigid body is an idealization of a solid body of finite size in which deformation is neglected. In other words, the distance between any two given points of a rigid body remains constant in time regardless of external forces exerted on it...
around a fixed point. A rotation is different from a translation, which has no fixed points, and from a reflection
Reflection (mathematics)
In mathematics, a reflection is a mapping from a Euclidean space to itself that is an isometry with a hyperplane as set of fixed points; this set is called the axis or plane of reflection. The image of a figure by a reflection is its mirror image in the axis or plane of reflection...
, which "flips" the bodies it is transforming. A rotation and the above-mentioned transformations are isometries; they leave the distance between any two points unchanged after the transformation.
It is important to know the frame of reference
Frame of reference
A frame of reference in physics, may refer to a coordinate system or set of axes within which to measure the position, orientation, and other properties of objects in it, or it may refer to an observational reference frame tied to the state of motion of an observer.It may also refer to both an...
when considering rotations, as all rotations are described relative to a particular frame of reference. In general for any orthogonal transformation on a body in a coordinate system
Coordinate system
In geometry, a coordinate system is a system which uses one or more numbers, or coordinates, to uniquely determine the position of a point or other geometric element. The order of the coordinates is significant and they are sometimes identified by their position in an ordered tuple and sometimes by...
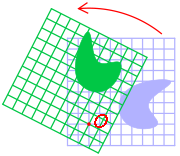
there is an inverse transformation which if applied to the frame of reference results in the body being at the same coordinates. For example in two dimensions rotating a body clockwise
Clockwise
Circular motion can occur in two possible directions. A clockwise motion is one that proceeds in the same direction as a clock's hands: from the top to the right, then down and then to the left, and back to the top...
about a point keeping the axes fixed is equivalent to rotating the axes counterclockwise about the same point while the body is kept fixed.
Two dimensions
Angle
In geometry, an angle is the figure formed by two rays sharing a common endpoint, called the vertex of the angle.Angles are usually presumed to be in a Euclidean plane with the circle taken for standard with regard to direction. In fact, an angle is frequently viewed as a measure of an circular arc...
is needed to specify a rotation in two dimensions – the angle of rotation. To calculate the rotation two methods can be used, either matrix algebra
Matrix (mathematics)
In mathematics, a matrix is a rectangular array of numbers, symbols, or expressions. The individual items in a matrix are called its elements or entries. An example of a matrix with six elements isMatrices of the same size can be added or subtracted element by element...
or complex numbers. In each the rotation is acting to rotate an object counterclockwise through an angle θ about the origin
Origin (mathematics)
In mathematics, the origin of a Euclidean space is a special point, usually denoted by the letter O, used as a fixed point of reference for the geometry of the surrounding space. In a Cartesian coordinate system, the origin is the point where the axes of the system intersect...
.
Matrix algebra
To carry out a rotation using matrices the point (x, y) to be rotated is written as a vector, then multiplied by a matrix calculated from the angle, , like so:
, like so: .
.where (x′, y′) are the co-ordinates of the point after rotation, and the formulae for x′ and y′ can be seen to be

The vectors
 and
and  have the same magnitude and are separated by an angle
have the same magnitude and are separated by an angle  as expected.
as expected.Complex numbers
Points can also be rotated using complex numbers, as the set of all such numbers, the complex planeComplex plane
In mathematics, the complex plane or z-plane is a geometric representation of the complex numbers established by the real axis and the orthogonal imaginary axis...
, is geometrically a two dimensional plane. The point (x, y) in the plane is represented by the complex number

This can be rotated through an angle θ by multiplying it by eiθ, then expanding the product using Euler's formula
Euler's formula
Euler's formula, named after Leonhard Euler, is a mathematical formula in complex analysis that establishes the deep relationship between the trigonometric functions and the complex exponential function...
as follows:

which gives the same result as before,

Like complex numbers rotations in two dimensions are commutative, unlike in higher dimensions. They have only one degree of freedom, as such rotations are entirely determined by the angle of rotation.
Three dimensions
Rotations in ordinaryEuclidean space
In mathematics, Euclidean space is the Euclidean plane and three-dimensional space of Euclidean geometry, as well as the generalizations of these notions to higher dimensions...
three-dimensional space differ from those in two dimensions in a number of important ways. Rotations in three dimensions are generally not commutative, so the order in which rotations are applied is important. They have three degrees of freedom, the same as the number of dimensions.
A three dimensional rotation can be specified in a number of ways. The most usual methods are as follows.
Matrix algebra
As in two dimensions a matrix can be used to rotate a point (x, y, z) to a point (x′, y′, z′). The matrix used is a 3 × 3 matrix,
This is multiplied by a vector representing the point to give the result

The matrix A is a member of the three dimensional special orthogonal group, SO(3), that is it is an orthogonal matrix
Orthogonal matrix
In linear algebra, an orthogonal matrix , is a square matrix with real entries whose columns and rows are orthogonal unit vectors ....
with determinant
Determinant
In linear algebra, the determinant is a value associated with a square matrix. It can be computed from the entries of the matrix by a specific arithmetic expression, while other ways to determine its value exist as well...
1. That it is an orthogonal matrix means that its rows are a set of orthogonal unit vectors (so they are an orthonormal basis
Orthonormal basis
In mathematics, particularly linear algebra, an orthonormal basis for inner product space V with finite dimension is a basis for V whose vectors are orthonormal. For example, the standard basis for a Euclidean space Rn is an orthonormal basis, where the relevant inner product is the dot product of...
) as are its columns, making it simple to spot and check if a matrix is a valid rotation matrix. The determinant of a rotation orthogonal matrix must be 1. The only other possibility for the determinant of an orthogonal matrix is -1, and this result means the transformation is a reflection
Reflection (mathematics)
In mathematics, a reflection is a mapping from a Euclidean space to itself that is an isometry with a hyperplane as set of fixed points; this set is called the axis or plane of reflection. The image of a figure by a reflection is its mirror image in the axis or plane of reflection...
, improper rotation
Improper rotation
In 3D geometry, an improper rotation, also called rotoreflection or rotary reflection is, depending on context, a linear transformation or affine transformation which is the combination of a rotation about an axis and a reflection in a plane perpendicular to the axis.Equivalently it is the...
or inversion in a point, i.e. not a rotation.
Matrices are often used for doing transformations, especially when a large number of points are being transformed, as they are a direct representation of the linear operator. Rotations represented in other ways are often converted to matrices before being used. They can be extended to represent rotations and transformations at the same time using Homogeneous coordinates
Homogeneous coordinates
In mathematics, homogeneous coordinates, introduced by August Ferdinand Möbius in his 1827 work Der barycentrische Calcül, are a system of coordinates used in projective geometry much as Cartesian coordinates are used in Euclidean geometry. They have the advantage that the coordinates of points,...
. Transformations in this space
Projective space
In mathematics a projective space is a set of elements similar to the set P of lines through the origin of a vector space V. The cases when V=R2 or V=R3 are the projective line and the projective plane, respectively....
are represented by 4 × 4 matrices, which are not rotation matrices but which have a 3 × 3 rotation matrix in the upper left corner.
The main disadvantage of matrices is that they are more expensive to calculate and do calculations with. Also in calculations where numerical instability
Numerical stability
In the mathematical subfield of numerical analysis, numerical stability is a desirable property of numerical algorithms. The precise definition of stability depends on the context, but it is related to the accuracy of the algorithm....
is a concern matrices can be more prone to it, so calculations to restore orthonormality
Orthonormality
In linear algebra, two vectors in an inner product space are orthonormal if they are orthogonal and both of unit length. A set of vectors form an orthonormal set if all vectors in the set are mutually orthogonal and all of unit length...
, which are expensive to do for matrices, need to be done more often.
Mobile frame rotations
Euler angles
The Euler angles are three angles introduced by Leonhard Euler to describe the orientation of a rigid body. To describe such an orientation in 3-dimensional Euclidean space three parameters are required...
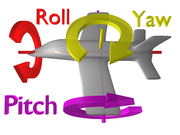
. They have the advantage of modelling a number of physical systems such as gimbal
Gimbal
A gimbal is a pivoted support that allows the rotation of an object about a single axis. A set of two gimbals, one mounted on the other with pivot axes orthogonal, may be used to allow an object mounted on the innermost gimbal to remain immobile regardless of the motion of its support...
s, and joystick
Joystick
A joystick is an input device consisting of a stick that pivots on a base and reports its angle or direction to the device it is controlling. Joysticks, also known as 'control columns', are the principal control in the cockpit of many civilian and military aircraft, either as a center stick or...
s, so are easily visualised, and are a very compact way of storing a rotation. But they are difficult to use in calculations as even simple operations like combining rotations are expensive to do, and suffer from a form of gimbal lock where the angles cannot be uniquely calculated for certain rotations.
Euler rotations
Euler angles
The Euler angles are three angles introduced by Leonhard Euler to describe the orientation of a rigid body. To describe such an orientation in 3-dimensional Euclidean space three parameters are required...
while leaving the other two constant. Euler rotations are never expressed in terms of the external frame, or in terms of the co-moving rotated body frame, but in a mixture. They constitute a mixed axes of rotation system, where the first angle moves the line of nodes around the external axis z, the second rotates around the line of nodes and the third one is an intrinsic rotation around an axis fixed in the body that moves.
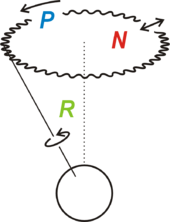
These rotations are called Precession
Precession
Precession is a change in the orientation of the rotation axis of a rotating body. It can be defined as a change in direction of the rotation axis in which the second Euler angle is constant...
, Nutation
Nutation
Nutation is a rocking, swaying, or nodding motion in the axis of rotation of a largely axially symmetric object, such as a gyroscope, planet, or bullet in flight, or as an intended behavior of a mechanism...
, and intrinsic rotation
Rotation
A rotation is a circular movement of an object around a center of rotation. A three-dimensional object rotates always around an imaginary line called a rotation axis. If the axis is within the body, and passes through its center of mass the body is said to rotate upon itself, or spin. A rotation...
.
Axis angle
A second way of generalising the two dimensional angle of rotationAngle of rotation
In mathematics, the angle of rotation is a measurement of the amount, the angle, that a figure is rotated about a fixed point, often the center of a circle....
is to specify an angle with the axis about which the rotation takes place. It can be used to model motion constrained by a hinge
Hinge
A hinge is a type of bearing that connects two solid objects, typically allowing only a limited angle of rotation between them. Two objects connected by an ideal hinge rotate relative to each other about a fixed axis of rotation. Hinges may be made of flexible material or of moving components...
s and Axle
Axle
An axle is a central shaft for a rotating wheel or gear. On wheeled vehicles, the axle may be fixed to the wheels, rotating with them, or fixed to its surroundings, with the wheels rotating around the axle. In the former case, bearings or bushings are provided at the mounting points where the axle...
s, and so is easily visualised, perhaps even more so than Euler angles. There are two ways to represent it;
- as a pair consisting of the angle and a unit vector for the axis, or
- as a vector obtained by multiplying the angle with this unit vector, called the rotation vector.
Usually the angle and axis pair is easier to work with, while the rotation vector is more compact, requiring only three numbers like Euler angles. But like Euler angles it is usually converted to another representation before being used.
Quaternions
Quaternions are in some ways the least intuitive representation of three dimensional rotations. They are not the three dimensional instance of a general approach, like matrices; nor are they easily related to real world models, like Euler angles or axis angles. But they are more compact than matrices and easier to work with than all other methods, so are often preferred in real world applications.A rotation quaternion consists of four real numbers, constrained so the length of the quaternion considered as a vector is 1. This constraint limits the degree of freedom of the quaternion to three, as required. It can be thought of as a generalisation of the complex numbers, by e.g. the Cayley–Dickson construction, and generates rotations in a similar way by multiplication. But unlike matrices and complex numbers two multiplications are needed:

where q is the quaternion q−1 is its inverse and x is the vector treated as a quaternion. The quaternion can be related to the rotation vector form of the axis angle rotation by the exponential map
Exponential map
In differential geometry, the exponential map is a generalization of the ordinary exponential function of mathematical analysis to all differentiable manifolds with an affine connection....
over the quaternions,

Where v is the rotation vector treated as a quaternion.
Four dimensions
Plane of rotation
In geometry, a plane of rotation is an abstract object used to describe or visualise rotations in space. In three dimensions it is an alternative to the axis of rotation, but unlike the axis of rotation it can be used in other dimensions, such as two, four or more dimensions.Mathematically such...
, through which points in the planes rotate. If these are ω1 and ω2 then all points not in the planes rotate through an angle between ω1 and ω2.
If ω1 = ω2 the rotation is a double rotation and all points rotate through the same angle so any two orthogonal planes can be taken as the planes of rotation. If one of ω1 and ω2 is zero, one plane is fixed and the rotation is simple. If both ω1 and ω2 are zero the rotation is the identity rotation.
Rotations in four dimensions can be represented by 4th order orthogonal matrices
Orthogonal matrix
In linear algebra, an orthogonal matrix , is a square matrix with real entries whose columns and rows are orthogonal unit vectors ....
, as a generalisation of the rotation matrix. Quaternions can also be generalised into four dimensions, as even Multivector
Multivector
In multilinear algebra, a multivector or clif is an element of the exterior algebra on a vector space, \Lambda^* V. This algebra consists of linear combinations of simple k-vectors v_1\wedge\cdots\wedge v_k."Multivector" may mean either homogeneous elements In multilinear algebra, a multivector...
s of the four dimensional Geometric algebra
Geometric algebra
Geometric algebra , together with the associated Geometric calculus, provides a comprehensive alternative approach to the algebraic representation of classical, computational and relativistic geometry. GA now finds application in all of physics, in graphics and in robotics...
. A third approach, which only works in four dimensions, is to use a pair of unit quaternions.
Rotations in four dimensions have six degrees of freedom, most easily seen when two unit quaternions are used, as each has three degrees of freedom (they lie on the surface of a 3-sphere
3-sphere
In mathematics, a 3-sphere is a higher-dimensional analogue of a sphere. It consists of the set of points equidistant from a fixed central point in 4-dimensional Euclidean space...
) and 2 × 3 = 6.
Relativity
One application of this is special relativitySpecial relativity
Special relativity is the physical theory of measurement in an inertial frame of reference proposed in 1905 by Albert Einstein in the paper "On the Electrodynamics of Moving Bodies".It generalizes Galileo's...
, as it can be considered to operate in a four dimensional space, spacetime
Spacetime
In physics, spacetime is any mathematical model that combines space and time into a single continuum. Spacetime is usually interpreted with space as being three-dimensional and time playing the role of a fourth dimension that is of a different sort from the spatial dimensions...
, spanned by three space dimensions and one of time. In special relativity this space is linear and the four dimensional rotations, called Lorentz transformation
Lorentz transformation
In physics, the Lorentz transformation or Lorentz-Fitzgerald transformation describes how, according to the theory of special relativity, two observers' varying measurements of space and time can be converted into each other's frames of reference. It is named after the Dutch physicist Hendrik...
s, have practical physical interpretations.
If a simple rotation is only in the three space dimensions, i.e. about a plane that is entirely in space, then this rotation is the same as a spatial rotation in three dimensions. But a simple rotation about a plane spanned by a space dimension and a time dimension is a "boost", a transformation between two different reference frames
Frame of reference
A frame of reference in physics, may refer to a coordinate system or set of axes within which to measure the position, orientation, and other properties of objects in it, or it may refer to an observational reference frame tied to the state of motion of an observer.It may also refer to both an...
, which together with other properties of spacetime determines the relativistic relationship between the frames. The set of these rotations forms the Lorentz group
Lorentz group
In physics , the Lorentz group is the group of all Lorentz transformations of Minkowski spacetime, the classical setting for all physical phenomena...
.
Orthogonal matrices
The set of all matrices M(v,θ) described above together with the operation of matrix multiplicationMatrix multiplication
In mathematics, matrix multiplication is a binary operation that takes a pair of matrices, and produces another matrix. If A is an n-by-m matrix and B is an m-by-p matrix, the result AB of their multiplication is an n-by-p matrix defined only if the number of columns m of the left matrix A is the...
is called rotation group
Rotation group
In mechanics and geometry, the rotation group is the group of all rotations about the origin of three-dimensional Euclidean space R3 under the operation of composition. By definition, a rotation about the origin is a linear transformation that preserves length of vectors and preserves orientation ...
: SO(3).
More generally, coordinate rotations in any dimension are represented by orthogonal matrices. The set of all orthogonal matrices of the n-th dimension which describe proper rotations (determinant = +1), together with the operation of matrix multiplication, forms the special orthogonal group: SO(n).
Orthogonal matrices have real elements. The analogous complex-valued matrices are the unitary matrices. The set of all unitary matrices in a given dimension n forms a unitary group
Unitary group
In mathematics, the unitary group of degree n, denoted U, is the group of n×n unitary matrices, with the group operation that of matrix multiplication. The unitary group is a subgroup of the general linear group GL...
of degree n, U(n); and the subgroup of U(n) representing proper rotations forms a special unitary group
Special unitary group
The special unitary group of degree n, denoted SU, is the group of n×n unitary matrices with determinant 1. The group operation is that of matrix multiplication...
of degree n, SU(n). The elements of SU(2) are used in quantum mechanics
Quantum mechanics
Quantum mechanics, also known as quantum physics or quantum theory, is a branch of physics providing a mathematical description of much of the dual particle-like and wave-like behavior and interactions of energy and matter. It departs from classical mechanics primarily at the atomic and subatomic...
to rotate spin
Spin (physics)
In quantum mechanics and particle physics, spin is a fundamental characteristic property of elementary particles, composite particles , and atomic nuclei.It is worth noting that the intrinsic property of subatomic particles called spin and discussed in this article, is related in some small ways,...
.