

Moving frame
Encyclopedia
Mathematics
Mathematics is the study of quantity, space, structure, and change. Mathematicians seek out patterns and formulate new conjectures. Mathematicians resolve the truth or falsity of conjectures by mathematical proofs, which are arguments sufficient to convince other mathematicians of their validity...
, a moving frame is a flexible generalization of the notion of an ordered basis of a vector space
Vector space
A vector space is a mathematical structure formed by a collection of vectors: objects that may be added together and multiplied by numbers, called scalars in this context. Scalars are often taken to be real numbers, but one may also consider vector spaces with scalar multiplication by complex...
often used to study the extrinsic differential geometry of smooth manifolds embedded in a homogeneous space
Homogeneous space
In mathematics, particularly in the theories of Lie groups, algebraic groups and topological groups, a homogeneous space for a group G is a non-empty manifold or topological space X on which G acts continuously by symmetry in a transitive way. A special case of this is when the topological group,...
.
Introduction
In lay terms, a frame or reference is a system of measuring rodMeasuring rod
A measuring rod is a tool used to physically measure lengths and survey areas of various sizes. Most measuring rods are round or square sectioned, however they can be flat boards. Some have markings at regular intervals...
s used by an observer
Observation
Observation is either an activity of a living being, such as a human, consisting of receiving knowledge of the outside world through the senses, or the recording of data using scientific instruments. The term may also refer to any data collected during this activity...
to measure the surrounding space by providing coordinates
Cartesian coordinate system
A Cartesian coordinate system specifies each point uniquely in a plane by a pair of numerical coordinates, which are the signed distances from the point to two fixed perpendicular directed lines, measured in the same unit of length...
. A moving frame is then a frame of reference which moves with the observer along a trajectory (a curve
Curve
In mathematics, a curve is, generally speaking, an object similar to a line but which is not required to be straight...
). The method of the moving frame, in this simple example, seeks to produce a "preferred" moving frame out of the kinematic
Kinematics
Kinematics is the branch of classical mechanics that describes the motion of bodies and systems without consideration of the forces that cause the motion....
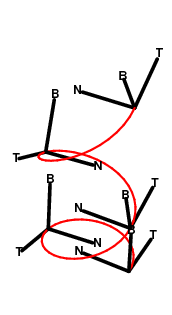
properties of the observer. In a geometrical setting, this problem was solved in the mid 19th century by Jean Frédéric Frenet
Jean Frédéric Frenet
Jean Frédéric Frenet was a French mathematician, astronomer, and meteorologist. He was born and died in Périgueux, France....
and Joseph Alfred Serret
Joseph Alfred Serret
Joseph Alfred Serret was a French mathematician who was born in Paris, France, and died in Versailles, France.-Books by J. A. Serret:* * *...
. The Frenet-Serret frame
Frenet-Serret formulas
In vector calculus, the Frenet–Serret formulas describe the kinematic properties of a particle which moves along a continuous, differentiable curve in three-dimensional Euclidean space R3...
is a moving frame defined on a curve which can be constructed purely from the velocity
Velocity
In physics, velocity is speed in a given direction. Speed describes only how fast an object is moving, whereas velocity gives both the speed and direction of the object's motion. To have a constant velocity, an object must have a constant speed and motion in a constant direction. Constant ...
and acceleration
Acceleration
In physics, acceleration is the rate of change of velocity with time. In one dimension, acceleration is the rate at which something speeds up or slows down. However, since velocity is a vector, acceleration describes the rate of change of both the magnitude and the direction of velocity. ...
of the curve.
The Frenet-Serret frame plays a key role in the differential geometry of curves
Differential geometry of curves
Differential geometry of curves is the branch of geometry that dealswith smooth curves in the plane and in the Euclidean space by methods of differential and integral calculus....
, ultimately leading to a more or less complete classification of smooth curves in Euclidean space up to congruence
Congruence (geometry)
In geometry, two figures are congruent if they have the same shape and size. This means that either object can be repositioned so as to coincide precisely with the other object...
. The Frenet-Serret formulas
Frenet-Serret formulas
In vector calculus, the Frenet–Serret formulas describe the kinematic properties of a particle which moves along a continuous, differentiable curve in three-dimensional Euclidean space R3...
show that there is a pair of functions defined on the curve, the torsion and curvature
Curvature
In mathematics, curvature refers to any of a number of loosely related concepts in different areas of geometry. Intuitively, curvature is the amount by which a geometric object deviates from being flat, or straight in the case of a line, but this is defined in different ways depending on the context...
, which are obtained by differentiating
Derivative
In calculus, a branch of mathematics, the derivative is a measure of how a function changes as its input changes. Loosely speaking, a derivative can be thought of as how much one quantity is changing in response to changes in some other quantity; for example, the derivative of the position of a...
the frame, and which describe completely how the frame evolves in time along the curve. A key feature of the general method is that a preferred moving frame, provided it can be found, gives a complete kinematic description of the curve.
Surface
In mathematics, specifically in topology, a surface is a two-dimensional topological manifold. The most familiar examples are those that arise as the boundaries of solid objects in ordinary three-dimensional Euclidean space R3 — for example, the surface of a ball...
in Euclidean space instead of a curve, the Darboux frame
Darboux frame
In the differential geometry of surfaces, a Darboux frame is a natural moving frame constructed on a surface. It is the analog of the Frenet–Serret frame as applied to surface geometry. A Darboux frame exists at any non-umbilic point of a surface embedded in Euclidean space...
(or the trièdre mobile as it was then called). It turned out to be impossible in general to construct such a frame, and that there were integrability conditions
Integrability conditions for differential systems
In mathematics, certain systems of partial differential equations are usefully formulated, from the point of view of their underlying geometric and algebraic structure, in terms of a system of differential forms. The idea is to take advantage of the way a differential form restricts to a...
which needed to be satisfied first.
Later, moving frames were developed extensively by Élie Cartan
Élie Cartan
Élie Joseph Cartan was an influential French mathematician, who did fundamental work in the theory of Lie groups and their geometric applications...
and others in the study of submanifolds of more general homogeneous spaces (such as projective space
Projective space
In mathematics a projective space is a set of elements similar to the set P of lines through the origin of a vector space V. The cases when V=R2 or V=R3 are the projective line and the projective plane, respectively....
). In this setting, a frame carries the geometric idea of a basis of a vector space over to other sorts of geometrical spaces (Klein geometries
Klein geometry
In mathematics, a Klein geometry is a type of geometry motivated by Felix Klein in his influential Erlangen program. More specifically, it is a homogeneous space X together with a transitive action on X by a Lie group G, which acts as the symmetry group of the geometry.For background and motivation...
). Some examples of frames are:
- A linear frame is an ordered basis of a vector spaceVector spaceA vector space is a mathematical structure formed by a collection of vectors: objects that may be added together and multiplied by numbers, called scalars in this context. Scalars are often taken to be real numbers, but one may also consider vector spaces with scalar multiplication by complex...
. - An affine frameAffine frameIn affine geometry, a branch of mathematics, an affine frame in an affine space A consists of a choice P of origin of A along with a basis of the space of vectors based at P....
of a vector space V consists of a choice of originAffine spaceIn mathematics, an affine space is a geometric structure that generalizes the affine properties of Euclidean space. In an affine space, one can subtract points to get vectors, or add a vector to a point to get another point, but one cannot add points. In particular, there is no distinguished point...
for V along with an ordered basis of vectors in V. - An orthonormal frameOrthonormal frameIn Riemannian geometry and relativity theory, an orthonormal frame is a tool for studying the structure of a differentiable manifold equipped with a metric...
of a vector space is an ordered basis consisting of orthogonal unit vectors (an orthonormal basisOrthonormal basisIn mathematics, particularly linear algebra, an orthonormal basis for inner product space V with finite dimension is a basis for V whose vectors are orthonormal. For example, the standard basis for a Euclidean space Rn is an orthonormal basis, where the relevant inner product is the dot product of...
). - A Euclidean frame of a vector space is a choice of origin along with an orthonormal basis for the vector space.
- A projective frameProjective frameIn the mathematical field of projective geometry, a projective frame is an ordered collection of points in projective space which can be used as reference points to describe any other point in that space...
on n-dimensional projective spaceProjective spaceIn mathematics a projective space is a set of elements similar to the set P of lines through the origin of a vector space V. The cases when V=R2 or V=R3 are the projective line and the projective plane, respectively....
is an ordered collection of n+1 linearly independent points in the space.
In each of these examples, the collection of all frames is homogeneous
Homogeneous space
In mathematics, particularly in the theories of Lie groups, algebraic groups and topological groups, a homogeneous space for a group G is a non-empty manifold or topological space X on which G acts continuously by symmetry in a transitive way. A special case of this is when the topological group,...
in a certain sense. In the case of linear frames, for instance, any two frames are related by an element of the general linear group
General linear group
In mathematics, the general linear group of degree n is the set of n×n invertible matrices, together with the operation of ordinary matrix multiplication. This forms a group, because the product of two invertible matrices is again invertible, and the inverse of an invertible matrix is invertible...
. Projective frames are related by the projective linear group
Projective linear group
In mathematics, especially in the group theoretic area of algebra, the projective linear group is the induced action of the general linear group of a vector space V on the associated projective space P...
. This homogeneity, or symmetry, of the class of frames captures the geometrical features of the linear, affine, Euclidean, or projective landscape. A moving frame, in these circumstances, is just that: a frame which varies from point to point.
Formally, a frame on a homogeneous space
Homogeneous space
In mathematics, particularly in the theories of Lie groups, algebraic groups and topological groups, a homogeneous space for a group G is a non-empty manifold or topological space X on which G acts continuously by symmetry in a transitive way. A special case of this is when the topological group,...
G/H consists of a point in the tautological bundle G → G/H. A moving frame is a section of this bundle. It is moving in the sense that as the point of the base varies, the frame in the fibre changes by an element of the symmetry group G. A moving frame on a submanifold M of G/H is a section of pullback
Pullback bundle
In mathematics, a pullback bundle or induced bundle is a useful construction in the theory of fiber bundles. Given a fiber bundle π : E → B and a continuous map f : B′ → B one can define a "pullback" of E by f as a bundle f*E over B′...
of the tautological bundle to M. Intrinsically a moving frame can be defined on a principal bundle
Principal bundle
In mathematics, a principal bundle is a mathematical object which formalizes some of the essential features of the Cartesian product X × G of a space X with a group G...
P over a manifold. In this case, a moving frame is given by a G-equivariant mapping φ : P → G, thus framing the manifold by elements of the Lie group G.
Although there is a substantial formal difference between extrinsic and intrinsic moving frames, they are both alike in the sense that a moving frame is always given by a mapping into G. The strategy in Cartan's method of moving frames, as outlined briefly in Cartan's equivalence method
Cartan's equivalence method
In mathematics, Cartan's equivalence method is a technique in differential geometry for determining whether two geometrical structures are the same up to a diffeomorphism...
, is to find a natural moving frame on the manifold and then to take its Darboux derivative
Darboux derivative
The Darboux derivative of a map between a manifold and a Lie group is a variant of the standard derivative. In a certain sense, it is arguably a more natural generalization of the single-variable derivative...
, in other words pullback the Maurer-Cartan form
Maurer-Cartan form
In mathematics, the Maurer–Cartan form for a Lie group G is a distinguished differential one-form on G that carries the basic infinitesimal information about the structure of G...
of G to M (or P), and thus obtain a complete set of structural invariants for the manifold.
Method of the moving frame
formulated the general definition of a moving frame and the method of the moving frame, as elaborated by . The elements of the theory are- A Lie groupLie groupIn mathematics, a Lie group is a group which is also a differentiable manifold, with the property that the group operations are compatible with the smooth structure...
G. - A Klein space X whose group of geometric automorphisms is G.
- A smooth manifold Σ which serves as a space of (generalized) coordinates for X.
- A collection of frames ƒ each of which determines a coordinate function from X to Σ (the precise nature of the frame is left vague in the general axiomatization).
The following axioms are then assumed to hold between these elements:
- There is a free and transitive group actionGroup actionIn algebra and geometry, a group action is a way of describing symmetries of objects using groups. The essential elements of the object are described by a set, and the symmetries of the object are described by the symmetry group of this set, which consists of bijective transformations of the set...
of G on the collection of frames: it is a principal homogeneous spacePrincipal homogeneous spaceIn mathematics, a principal homogeneous space, or torsor, for a group G is a homogeneous space X for G such that the stabilizer subgroup of any point is trivial...
for G. In particular, for any pair of frames ƒ and ƒ′, there is a unique transition of frame (ƒ→ƒ′) in G determined by the requirement (ƒ→ƒ′)ƒ = ƒ′.
- Given a frame ƒ and a point A ∈ X, there is associated a point x = (A,ƒ) belonging to Σ. This mapping determined by the frame ƒ is a bijection from the points of X to those of Σ. This bijection is compatible with the law of composition of frames in the sense that the coordinate x′ of the point A in a different frame ƒ′ arises from (A,ƒ) by application of the transformation (ƒ→ƒ′). That is,

Of interest to the method are parameterized submanifolds of X. The considerations are largely local, so the parameter domain is taken to be an open subset of Rλ. Slightly different techniques apply depending on whether one is interested in the submanifold along with its parameterization, or the submanifold up to reparameterization.
Moving tangent frames
The most commonly encountered case of a moving frame is for the bundle of tangent frames (also called the frame bundleFrame bundle
In mathematics, a frame bundle is a principal fiber bundle F associated to any vector bundle E. The fiber of F over a point x is the set of all ordered bases, or frames, for Ex...
) of a manifold. In this case, a moving tangent frame on a manifold M consists of a collection of vector fields X1, X2 , ..., Xn forming a basis of the tangent space
Tangent space
In mathematics, the tangent space of a manifold facilitates the generalization of vectors from affine spaces to general manifolds, since in the latter case one cannot simply subtract two points to obtain a vector pointing from one to the other....
at each point of an open set U ⊂ M.
Coframes
A moving frame determines a dual frame or coframeCoframe
In mathematics, a coframe or coframe field on a smooth manifold M is a system of one-forms or covectors which form a basis of the cotangent bundle at every point. In the exterior algebra of M, one has a natural map from v_k:\bigoplus^kT^*M\to\bigwedge^kT^*M, given by v_k:\mapsto...
of the cotangent bundle
Cotangent bundle
In mathematics, especially differential geometry, the cotangent bundle of a smooth manifold is the vector bundle of all the cotangent spaces at every point in the manifold...
over U, which is sometimes also called a moving frame. This is a n-tuple of smooth 1-forms
- α1, α2 , ..., αn
which are linearly independent at each point q in U. Conversely, given such a coframe, there is a unique moving frame X1, X2 , ..., Xn which is dual to it, i.e., satisfies the duality relation αi(Xj) = δij, where δij is the Kronecker delta function on U.
Uses
Moving frames are important in general relativityGeneral relativity
General relativity or the general theory of relativity is the geometric theory of gravitation published by Albert Einstein in 1916. It is the current description of gravitation in modern physics...
, where there is no privileged way of extending a choice of frame at an event p (a point in spacetime
Spacetime
In physics, spacetime is any mathematical model that combines space and time into a single continuum. Spacetime is usually interpreted with space as being three-dimensional and time playing the role of a fourth dimension that is of a different sort from the spatial dimensions...
, which is a manifold of dimension four) to nearby points, and so a choice must be made. In contrast in special relativity
Special relativity
Special relativity is the physical theory of measurement in an inertial frame of reference proposed in 1905 by Albert Einstein in the paper "On the Electrodynamics of Moving Bodies".It generalizes Galileo's...
, M is taken to be a vector space V (of dimension four). In that case a frame at a point p can be translated from p to any other point q in a well-defined way. Broadly speaking, a moving frame corresponds to an observer, and the distinguished frames in special relativity represent inertial observers
Inertial frame of reference
In physics, an inertial frame of reference is a frame of reference that describes time homogeneously and space homogeneously, isotropically, and in a time-independent manner.All inertial frames are in a state of constant, rectilinear motion with respect to one another; they are not...
.
In relativity and in Riemannian geometry
Riemannian geometry
Riemannian geometry is the branch of differential geometry that studies Riemannian manifolds, smooth manifolds with a Riemannian metric, i.e. with an inner product on the tangent space at each point which varies smoothly from point to point. This gives, in particular, local notions of angle, length...
, the most useful kind of moving frames are the orthogonal and orthonormal frame
Orthonormal frame
In Riemannian geometry and relativity theory, an orthonormal frame is a tool for studying the structure of a differentiable manifold equipped with a metric...
s, that is, frames consisting of orthogonal (unit) vectors at each point. At a given point p a general frame may be made orthonormal by orthonormalization; in fact this can be done smoothly, so that the existence of a moving frame implies the existence of a moving orthonormal frame.
Further details
A moving frame always exists locally, i.e., in some neighbourhood U of any point p in M; however, the existence of a moving frame globally on M requires topological conditions. For example when M is a circleCircle
A circle is a simple shape of Euclidean geometry consisting of those points in a plane that are a given distance from a given point, the centre. The distance between any of the points and the centre is called the radius....
, or more generally a torus
Torus
In geometry, a torus is a surface of revolution generated by revolving a circle in three dimensional space about an axis coplanar with the circle...
, such frames exist; but not when M is a 2-sphere
Sphere
A sphere is a perfectly round geometrical object in three-dimensional space, such as the shape of a round ball. Like a circle in two dimensions, a perfect sphere is completely symmetrical around its center, with all points on the surface lying the same distance r from the center point...
. A manifold that does have a global moving frame is called parallelizable. Note for example how the unit directions of latitude
Latitude
In geography, the latitude of a location on the Earth is the angular distance of that location south or north of the Equator. The latitude is an angle, and is usually measured in degrees . The equator has a latitude of 0°, the North pole has a latitude of 90° north , and the South pole has a...
and longitude
Longitude
Longitude is a geographic coordinate that specifies the east-west position of a point on the Earth's surface. It is an angular measurement, usually expressed in degrees, minutes and seconds, and denoted by the Greek letter lambda ....
on the Earth's surface break down as a moving frame at the north and south poles.
The method of moving frames of Élie Cartan
Élie Cartan
Élie Joseph Cartan was an influential French mathematician, who did fundamental work in the theory of Lie groups and their geometric applications...
is based on taking a moving frame that is adapted to the particular problem being studied. For example, given a curve
Curve
In mathematics, a curve is, generally speaking, an object similar to a line but which is not required to be straight...
in space, the first three derivative vectors of the curve can in general give a frame at a point of it (cf. torsion
Torsion
The word torsion may refer to the following:*In geometry:** Torsion of a curve** Torsion tensor in differential geometry** The closely related concepts of Reidemeister torsion and analytic torsion ** Whitehead torsion*In algebra:** Torsion ** Tor functor* In medicine:** Ovarian...
for this in quantitative form - it assumes the torsion is not zero). In fact, in the method of moving frames, one more often works with coframes rather than frames. More generally, moving frames may be viewed as sections of principal bundle
Principal bundle
In mathematics, a principal bundle is a mathematical object which formalizes some of the essential features of the Cartesian product X × G of a space X with a group G...
s over open sets U. The general Cartan method exploits this abstraction using the notion of a Cartan connection
Cartan connection
In the mathematical field of differential geometry, a Cartan connection is a flexible generalization of the notion of an affine connection. It may also be regarded as a specialization of the general concept of a principal connection, in which the geometry of the principal bundle is tied to the...
.
Applications
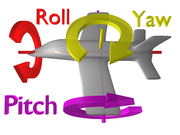
Aerobatic maneuver
Aerobatic maneuvers are flight paths putting aircraft in unusual attitudes, in air shows, dog fights or competition aerobatics. Aerobatics can be performed by a single aircraft or in formation with several others...
s can be expressed in terms of the moving frame (Aircraft principal axes
Aircraft principal axes
An aircraft in flight is free to rotate in three dimensions: pitch, nose up or down about an axis running from wing to wing), yaw, nose left or right about an axis running up and down; and roll, rotation about an axis running from nose to tail. The axes are alternatively designated as lateral,...
) when described by the pilot.
See also
- Cartan connection applicationsCartan connection applicationsThe vierbein or tetrad theory much used in theoretical physics is a special case of the application of Cartan connection in four-dimensional manifolds. It applies to metrics of any signature. This section is an approach to tetrads, but written in general terms...
- Frame fields in general relativityFrame fields in general relativityIn general relativity, a frame field is a set of four orthonormal vector fields, one timelike and three spacelike, defined on a Lorentzian manifold that is physically interpreted as a model of spacetime...
- Frenet–Serret formulas
- Yaw, pitch, and roll